I-train propose 3 type de mesures. Effectivement avec un appareil acheté dans le commerce, mais surtout en mesurant entre deux cantons ou en mesurant avec 3 cantons contigus. C'est ce dernier le plus utilisé.
Le principe est simple : il chronomètre le temps parcouru sur une distance connue (en marche avant et en marche arrière) et converti cette mesure en vitesse selon l'échelle pratiquée. Il refait l'exercice plusieurs fois pour obtenir une moyenne.
Pour construire une courbe de vitesse, il applique la même procédure pour des paliers sélectionnés par l'utilisateur. C'est sûr que si on sélectionne les 126 pas, cela risque de prendre pas mal de temps. Par contre 2 ou 3 points intermédiaires choisis adéquatement donnent déjà une bonne approximation.
Et à nouveau, comme s'est enregistré dans I-Train et non dans la loco, c'est valable pour une loco DCC ( avec décodeur physique) ou Analogique (sans décodeur physique).
Pour la présence sur le réseau, il ne peut y avoir qu'une seule loco (Dcc ou Analogique) sur un canton. C'est finalement le principe du cantonnement utilisé dans la réalité. Une traction double ne pourra être réalisée qu'avec des locos de même type ( Dcc ou analogique, mais pas de mix). Dinamo bascule automatiquement l'alimentation du canton concerné en conséquence.
Dinamo = analogique + digital
-
oups65

- Messages : 322
- Inscription : 01 oct. 2013, 17:45
- Type de centrale : Analogique et numérique
- Localisation : TOURNAI
Re: Dinamo = analogique + digital
OUPS65
membre AFAN et AGP3D, I-TRAIN - centrale DINAMO RM-C + TM44 et OC32/GN - imprimantes 3D ELEGOO Saturn et MK3S
membre AFAN et AGP3D, I-TRAIN - centrale DINAMO RM-C + TM44 et OC32/GN - imprimantes 3D ELEGOO Saturn et MK3S
-
thierry
- Messages : 651
- Inscription : 26 févr. 2014, 23:32
- Type de centrale : Analogique
- Localisation : Lierneux
Re: Dinamo = analogique + digital
Alors là je suis scotché tu maîtrises le sujet. A croire que c'est toi qui l'a mis au point.
Par contre je n'arrive pas à trouver où on peu s'en procurer.
Par contre je n'arrive pas à trouver où on peu s'en procurer.
-
oups65
- Messages : 322
- Inscription : 01 oct. 2013, 17:45
- Type de centrale : Analogique et numérique
- Localisation : TOURNAI
Re: Dinamo = analogique + digital
Rien n'est parfait et tout est affaire de compromis.
Il vaudrait peut être mieux que tu t'orientes vers le téléchargement du logiciel I-Train en version gratuite, ainsi que son mode d'emploi. https://www.berros.eu/fr/itrain/
Tu pourras ainsi le tester avant achat.
Pour Dinamo, le mieux serait d'attendre que j'ai terminé les explications d'emploi, histoire de voir alors si cette solution peut répondre à tes attentes.
Il vaudrait peut être mieux que tu t'orientes vers le téléchargement du logiciel I-Train en version gratuite, ainsi que son mode d'emploi. https://www.berros.eu/fr/itrain/
Tu pourras ainsi le tester avant achat.
Pour Dinamo, le mieux serait d'attendre que j'ai terminé les explications d'emploi, histoire de voir alors si cette solution peut répondre à tes attentes.
OUPS65
membre AFAN et AGP3D, I-TRAIN - centrale DINAMO RM-C + TM44 et OC32/GN - imprimantes 3D ELEGOO Saturn et MK3S
membre AFAN et AGP3D, I-TRAIN - centrale DINAMO RM-C + TM44 et OC32/GN - imprimantes 3D ELEGOO Saturn et MK3S
-
oups65
- Messages : 322
- Inscription : 01 oct. 2013, 17:45
- Type de centrale : Analogique et numérique
- Localisation : TOURNAI
Re: Dinamo = analogique + digital
chapitre 6 : la gestion des cantons avec le TM44
Il faut de l'ordre et de la méthode pour ne pas s’emmêler les pinceaux avec les adresses des cartes, des cantons et des sections. N'hésitez pas à faire un plan/tableau avant de passer aux paramétrages physiques, tant pour Dinamo que pour I-Train.
6-1 : préalable : le canton et ses sections
Chaque canton (appelé « bloc » dans Dinamo) doit être totalement isolé des autres et peut comporter jusqu'à 4 sections.
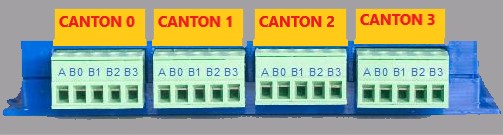
Un canton est constitué d'un rail continu « A » et d'un rail divisé en 4 sections isolées « B0 », « B1 », « B2 » et « B3 ».
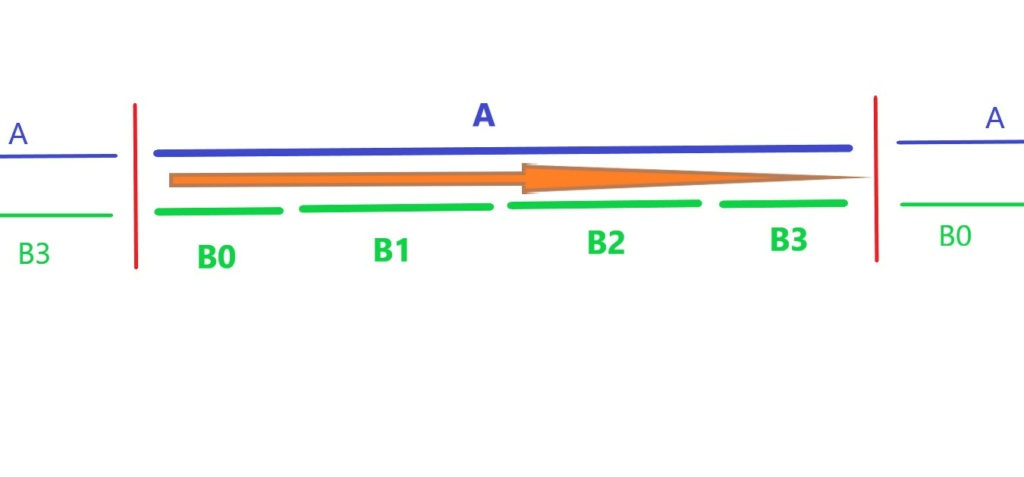
Dinamo utilisera ces quatre sections pour déterminer avec précision où se trouve la loco dans le canton. C'est ce qu'on appelle la rétrosignalisation.
Il n'est cependant pas obligatoire de les utiliser toutes les quatre. Une, deux ou trois sont aussi acceptable.
Pas besoin d'accessoires, ce sont les rails et la loco qui est dessus qui vont fournir l'info à Dinamo.
Il ne peut y avoir qu'une seule loco (Dcc ou Analogique) sur un canton. C'est finalement le principe du cantonnement utilisé dans la réalité. Une traction double ne pourra être réalisée qu'avec des locos de même type ( Dcc ou analogique, mais pas de mix). Dinamo basculera automatiquement l'alimentation du canton concerné en conséquence.
6-2 : descriptif
La carte TM44 est livrée nue. Un cache existe et peut être commandé séparément. Les miennes étant placées sous la table de roulement et je n'ai pas trouvé nécessaire de me procurer les caches.
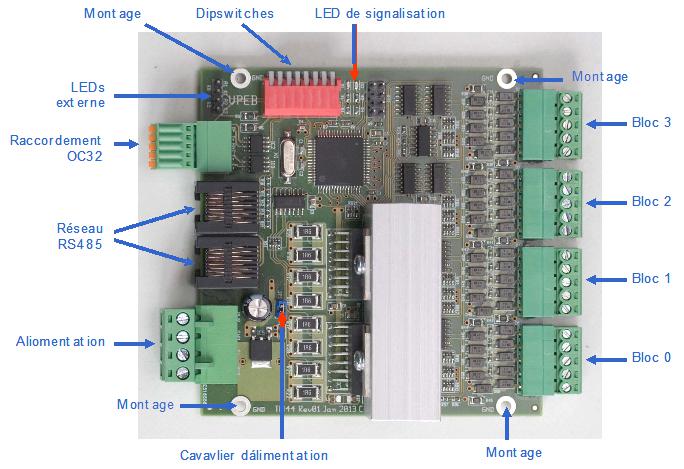
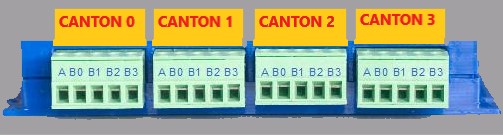
à sa droite, vous avez la possibilité de connecter 4 cantons (blocs) avec 5 connections à chaque fois, de gauche à droite (ordre à respecter) : le rail continu « A », et les 4 sections de rails « B0 », « B1 », « B2 » , »B3 ».
Les connecteurs des sections non utilisées sont laissés vides.

à sa gauche, vous avez une possibilité supplémentaire de connecter un OC32 (voir cette section), une entrée + une sortie pour les connecteurs RJ45 (réseau RS485), et l'alimentation en courant continu de la carte et des rails.
Référez vous au chapitre 2, « avantages ».
en haut, le sélecteur ( « dipswitches ») içi en rouge pour la personnalisation de la carte. Sa couleur peut changer selon la fabrication.
Les trous de fixations placés aux quatre coins ont un diamètre de 3mm.
Pour le montage sur un support, préférez des entretoises de minimum 10mm pour éviter d'écraser / faire des faux contacts entre le verso de la carte et le support sur lequel la carte sera fixée.
Attention aux faux contacts avec des entretoises non isolées.
On peut aussi empiler les cartes.
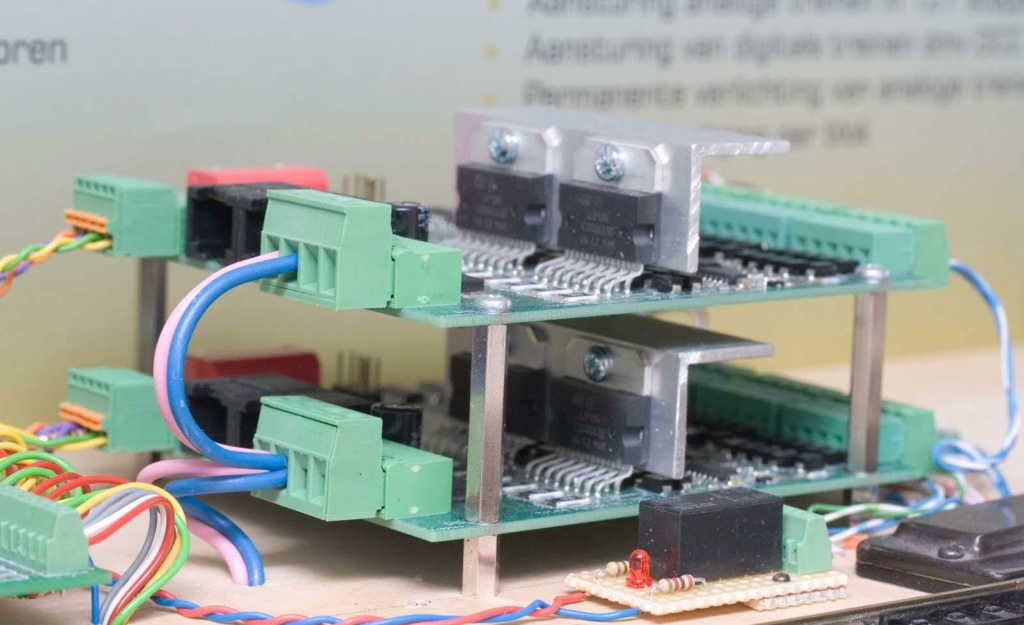
Veillez à laisser une distance suffisante entr'elles pour permettre de placer les fils de connexions et manipuler le sélecteur. Une hauteur d'entretoise M3 x 30mm minimum est recommandée par le constructeur.
Pas très compliqué
6-3 : le câblage entre le TM44 et les cantons.
Les 4 cantons (blocs) connectés sur une même carte peuvent se situer n'importe où dans le réseau et ne doivent pas nécessairement être contigus.
Il est recommandé de limiter la longueur du câble entre TM44 et les rails à un maximum de 10 mètres. Retenez cependant que ces cartes sont prévues pour être placées au plus près des cantons qu'elles dirigeront. Au plus près, au mieux !
Afin de minimiser autant que possible les interférences électromagnétiques, il est fortement recommandé de garder ensemble les fils d'un même canton (bloc), avec un câble multiconducteur séparé par canton. Sa section ne doit pas être importante si sa longueur reste sous les 2 mètres. Cependant, un câble trop fin génère une chute de tension, source d’un comportement inconstant des trains. Une section de 0,2mm2 sera le strict minimum. Notez que le câblage doit être capable de supporter un courant de court-circuit, courant qui est toujours assez important.
Les câbles téléphoniques / internet sont valable. Pour augmenter la section utile, on peut connecter les fils deux par deux. Tout dépendra du nombre de sections utilisées et du nombre de fils disponibles dans le câble.
Attention cependant, ceux avec des fils à âme pleine (rigide) cassent avec une facilité déconcertante au niveau des connexions. Je ne les utilise plus et préfère du câble réseau (UTP LAN) à âme souple. Leur niveau de catégorie est sans importance. Choisissez le moins cher.
Autre avantage, le fil torsadé a de meilleures propriétés dans les hautes fréquences.
Par sécurité, j'ai prévu du 0,5 mm2 (20AWG) avec des fils à âme souple.
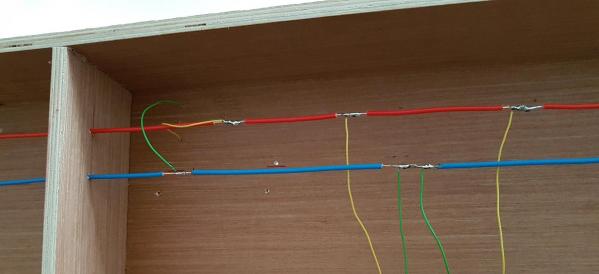
Vous pouvez aussi utiliser des fils séparés. Il vaut mieux alors les torsader entre eux, canton par canton.
Du coté du rail, le mieux est de les y souder proprement du coté extérieur. Le ballast permettra de les dissimuler.
à retenir pour les connexions aux cantons :
* TM44 au plus près des cantons
* multiconducteur souple avec section des fils pas trop faibles.
* un multiconducteurs par canton.
* respecter la séquence de branchement ( A, B0, B1, B2, B3) sur le TM44
* le nombre de sections utilisées peut aller de un à quatre (B0 à B3)
6-4 : câblage du réseau RJ45 – RS485
Plus simple n'est pas possible : branchez. Il n'y a rien de plus à dire que ce qui a été explicité dans le chapitre 2 « cinquième avantage ».
Et j'en ajoute une couche :
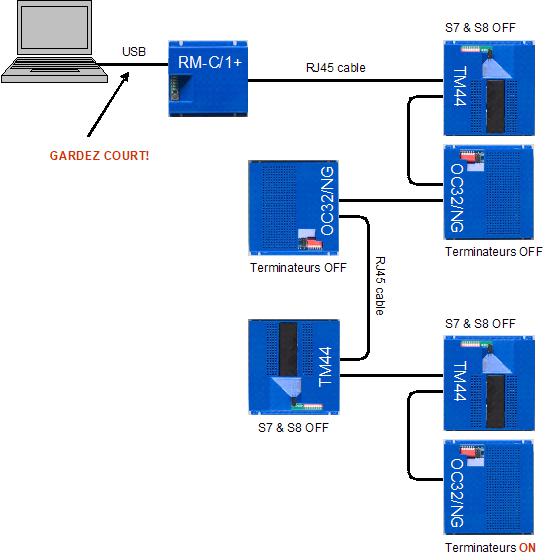
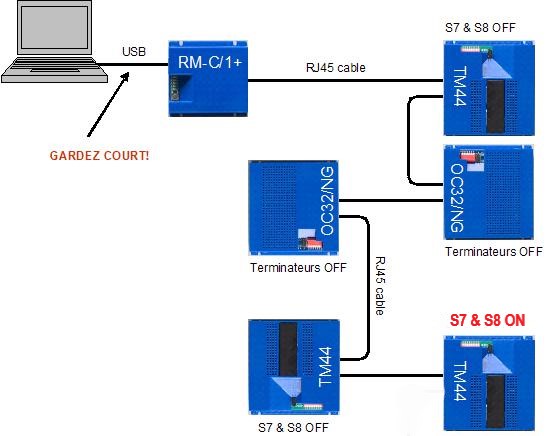
La première carte se branche sur la sortie de la centrale RM-C. Ce sera une TM44 avec l'adresse primaire (0.0) ( cnf 6-6)
Un câble RJ45 arrive de la carte précédente, l'autre fait la connexion avec la suivante. Le choix de la prise RJ45 (gauche ou droite) utilisée n'a aucune importance. Le mix dans les cartes TM44 et OC32 est sans importance.
.....
ou
Ce réseau a trois fonctions :
* TM44 : assurer la transmission des instructions venant de l'ordinateur ( décodées par la centrale) aux rails et donc aux locos, avec retour de positionnement (retrosignalisation).
* OC32 : assurer la transmission des ordres venant de l'ordinateur ( décodées par la centrale) aux accessoires ( moteurs d' aiguillage, etc..).
* garder toutes les cartes synchronisées entre elles pour éviter l'anarchie.
Nb : Assurez-vous que les connecteurs RJ45 sont montés avec leurs 6 broches connectées.
6-5 Quelle est la dernière carte TM44 ou OC32 du réseau ?
Il faut signaler à la centrale quelle est la dernière carte TM44 ou OC32 qui est branchée sur le réseau, pour lui indiquer qu'elle ne doit pas chercher d'autres cartes plus loin. Ce sera celle qui n'a qu'une seule connexion RJ45 occupée.
Comme sur l'OC32, il faut chipoter sur des cavaliers ( les sélecteurs S7 et S8 ne fonctionnant pas sur cette carte) , il est plus simple de décider de placer une carte TM44 en dernier.
Si vous voulez quand même placer un OC32 en fin de circuit, reportez-vous à la section OC32 pour la gestion de ses cavaliers. Honnêtement, ce n'est pas sorcier. Juste qu'il faut des doigts agiles pour le placement correct des cavaliers.... et de savoir comment les placer ( pas les doigts, les cavaliers!).
Comment les utiliser ?
* Pour toutes les cartes : pour les TM44, cela se fait physiquement en mettant sur « OFF » les 7ème et 8ème sélecteurs du bloc rouge signalé sur le schéma TM44 ci-dessus. Attention : Les OC32 sont paramétrés sur « ON » en sortie d'usine. Il faut donc rectifier la position des cavaliers. Cnf 7-4
*Pour la dernière carte, celle qui n'a qu'une seule connexion RJ45 occupée : si c'est une TM44, mettre ses sélecteurs S7 et S8 sur ON. Si c'est une OC32, vérifiez la positions des cavaliers.Cnf 7-4
Nb : dans le jargon Dinamo, ces deux sélecteurs S7-S8 / cavaliers sont appelés «terminateurs/terminators».
Exercice complexe : trouver la carte «terminator/ terminateur» dans le schéma réseau ci-dessus ... Ceux du fond de la classe ne soufflent pas !
Vraiment complexe, n'est il pas ?
6-6 : adresses des cartes TM44 :
On parle içi uniquement des adresses des cartes TM44 ( et pas des cantons ni des sections).
Chaque carte TM44 doit avoir une adresse exclusive, sans doublon.
Notez que une carte TM44 et une carte OC32 peuvent avoir la même adresse car elles sont de deux familles totalement différentes. On peut donc ignorer totalement les cartes OC32 dans les explications qui suivent.
Rugueuse et étrange numérotation par DINAMO qui vient d'anciennes contraintes informatiques. Après tout, pourquoi pas.
Les adresses possibles sont :
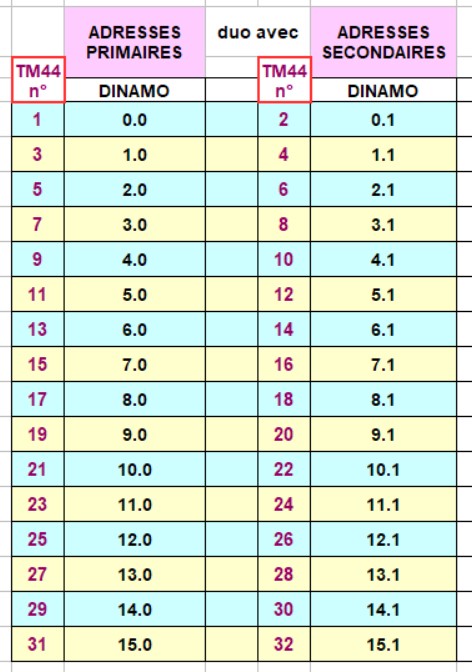
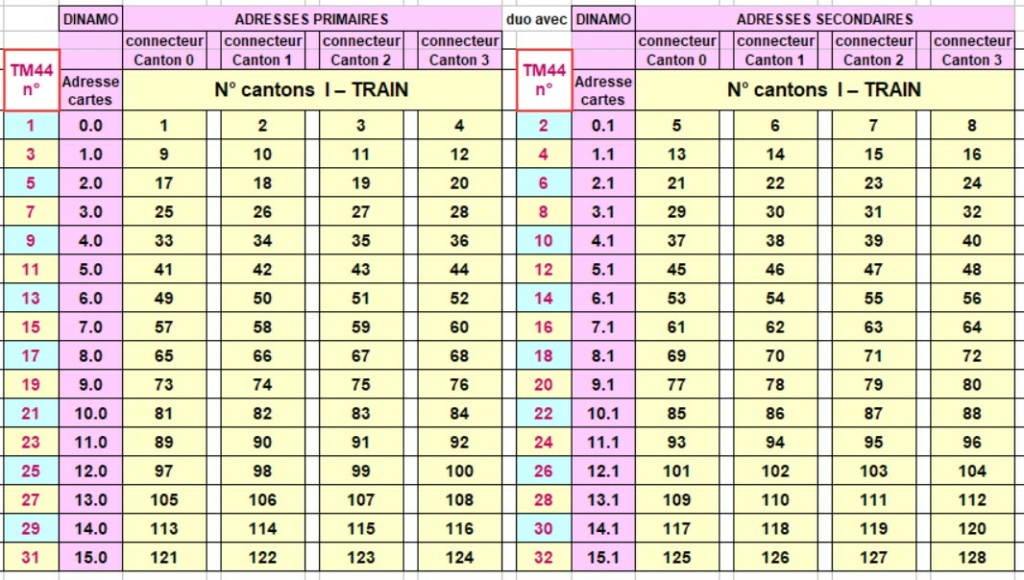
On dispose de 32 adresses pour les cartes TM44.
Nb : J'ai posé sur chaque carte TM44 un autocollant numéroté de 1 à 32
Sur la figure, vous voyez que les adresses sont groupées en duo « primaire » et « secondaire ». Pas de stress, il n'y a pas de différence de performance entre une carte avec adresse primaire ou secondaire.
Attention, remarques importantes :
* Aucun doublon dans les adresses des TM44.
* L'adresse n° (0.0) doit toujours exister. Ce sera la première carte branchée sur la centrale RM-C.
* vous ne pouvez pas utiliser une adresse secondaire si son équivalent en adresse primaire n'existe pas. Par exemple, on peut utiliser l'adresse secondaire 3.1 uniquement si l'adresse primaire 3.0 a été utilisée.
-->En conséquence, si un seul TM44 est assigné à un duo d'adresses, il doit avoir une adresse primaire, l'adresse secondaire restant inutilisée. Cela arrive par exemple en cas d'un nombre impair de cartes TM44.
-->En conséquence, une ou des adresses secondaires peuvent ne pas être utilisées.
* il n'est pas indispensable que les adresses des cartes TM44 se suivent si on respecte la contrainte précédente.
* Garder un ordre séquentiel continu accélérera le travail de collecte /envois des infos/instructions effectué par l'ordinateur et la centrale. On élimine en effet les temps de recherches sur des cartes / adresses inexistantes.
Ces adresses sont définies avec les 5 premiers sélecteurs ( S1 à S5) du bloc rouge sur la carte TM44 montrée ci-dessus.
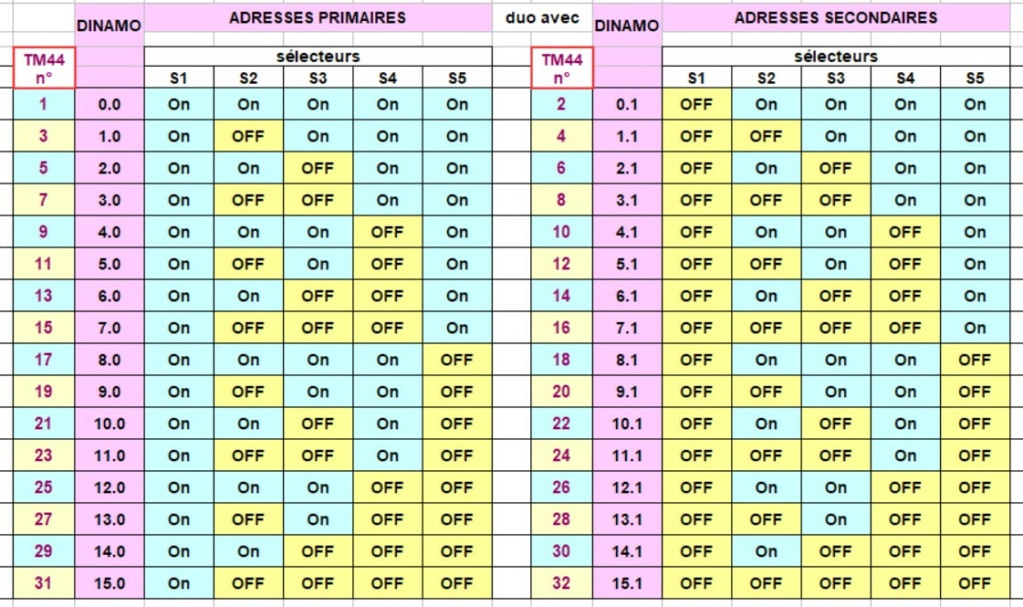
n.b. : les adresses des cartes sont chargées une fois pour toute lors de la mise sous tension de la centrale RM-C/1+. Si vous voulez modifier l'adresse d'une carte, il vous faudra éteindre et relancer la centrale pour que votre modification devienne active.
6-7 TM44 Maître / Esclaves
50 nuances de grey ?
Les TM44 doivent être parfaitement synchronisés pour éviter un court-circuit lorsqu'un train passe d'un bloc à un autre. Pour y parvenir, un seul et unique TM44 dirigera tous les autres qui lui obéiront.
Comment procéder ?
* mettre le 6ème sélecteur (S6) du bloc rouge sur ON sur la carte TM44 ayant l'adresse primaire (0.0). Ce sera le « Maitre »
* mettre ce 6ème sélecteur (S6) sur OFF sur toutes les autres cartes TM44. Ce seront les esclaves.
6-8 résumé pour les 8 sélecteurs du bloc rouge d'une carte TM44
pour TM44 uniquement :
* S1 + S2 + S3 + S4 + S5 = sélection d'une adresse exclusive.
* S6 = ON sur la carte avec adresse 0.0, OFF sur toutes les autres.
pour TM44 ET OC 32 :
* S7 + S8 = les deux sélecteurs sur ON sur la dernière carte (TM44 ou OC32) du réseau, et sur OFF pour toutes les autres cartes (TM44 et OC32).
6-9 : adresses des cantons dans une carte TM44 :
Reste maintenant à définir l'adresse d'un canton.
I-Train va nous simplifier fortement la vie en rendant cette numérotation conviviale.
Cette adresse doit être unique et est attribuée automatiquement par Dinamo. Elle sera utilisée par votre logiciel de contrôle et permettra de la relier aux numéros de retro-signalisation signalant l'occupation d’une section par un train.
Vous suivez ?
Une carte TM44 a une adresse exclusive ( soit un n° primaire ou soit un n° secondaire) --> qui la relie aux 4 cantons qu'elle gère --> chaque canton surveille 4 sections de détection de présence (rétrosignalisation).
Pour se rafraîchir les idées, rappel du schéma d'un canton sachant qu'il y en a 4 sur une carte TM44 :
Vous vous souvenez aussi de la figure avec les 4 groupes de connecteurs cantons présents sur une carte TM44 :
I-train a clarifié la situation en travaillant avec une numérotation modulaire.
Ce qui veut dire que pour la carte TM44 avec l'adresse primaire (0.0) , le premier canton a le n° 1, le deuxième le n°2, le troisième le n° 4, le quatrième le n°5.
Et ainsi de suite.
Simplissime !
6-10 : adresses des 4 sections d'un canton dans une carte TM44 :
Içi aussi, I-train a tout simplifié.
Les sections sont numérotées (x.1) – (x.2) – (x.3) – (x.4)
ex : dans le canton I-Train n°1, les sections sont (1.1) - (1.2) - (1.3) – (1.4)
dans le canton I-Train n°2, les sections sont (2.1) - (2.2) - (2.3) – (2.4)
dans le canton I-Train n°27, les sections sont (27.1) - (27.2) - (27.3) - (27.4)
etc...
Exemple de paramétrage d'une section de détection de présence (rétrosignalisation) dans un canton I-train :
il s'agit
* pour dinamo de la section b2 du canton 0 de la carte principale n° 0.0
* pour i-train de la section 3 du canton 1 qu'il nomme 1.3
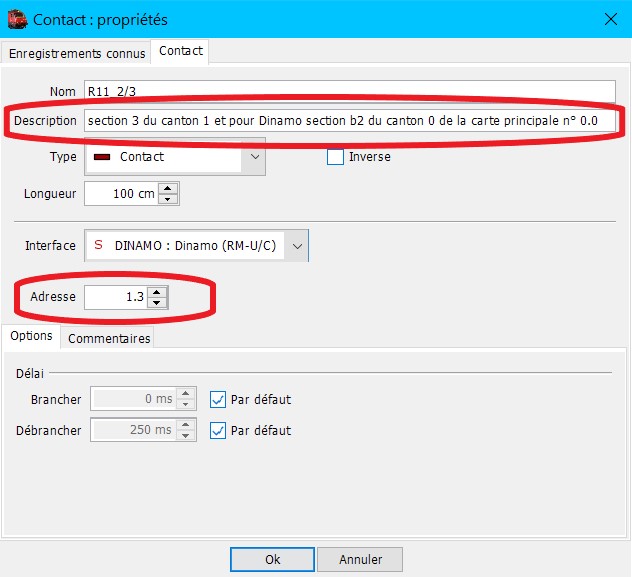
C'est quand même nettement plus convivial dans I-Train. Or, c'est que l'on utilise en pratique. Ouf.
Si vous utilisez un autre logiciel que I-Train, qui pourrait ne pas suivre une numérotation modulaire mais une numérotation linéaire, veuillez vous référer au mode d'emploi officiel section 5.3.1 « Adressage du TM44 ».
6-11 : l'alimentation électrique des cartes et du réseau
Encore une simplification, dans Dinamo cette fois.
Chaque carte est alimentée séparément en courant continu.
Vous pouvez utiliser plusieurs sources d'alimentation, avec un mix éventuel entre TM44 et OC32.
Important : Assurez-vous que les pôles négatifs GND (-) de toutes les alimentations utilisées sont tous connectés les uns aux autres ET aux bornes GND (-) des cartes Dinamo.
C'est déjà le cas en interne pour toutes les cartes Dinamo.
6-11- 1 la source en courant continu :
un transfo avec sortie courant continu ou mieux, une alimentation à découpage adaptée (14v- 18v, 200w pour 10 locos HO) se trouve facilement sur internet à un prix très raisonnable.
Pour l'échelle N, on recommande une tension de 14V et pour l'échelle Z de 10V à 13V Considérez qu'une loco HO consomme 1A, la moitié moins en N. Il faut y ajouter les besoins pour les moteurs d'aiguillages et tous les autres accessoires. La puissance se calcule par la formule
Puissance = Tension en Volt (ex : 14) x Courant en Ampère.
Vous pouvez utiliser plusieurs alimentations selon la puissance totale nécessaire. Il suffit de relier toutes les bornes « - » ensemble.
Une suggestion pour les grands réseaux : une ou plusieurs alimentations pour la traction (TM44) et une séparée pour les accessoires (OC32). Ceci implique plusieurs feeders séparés (cnf 6-11-2).

Attention : Faite le choix d'une marque réputée style MeanWell plutôt que le prix chinois dont les composants internes (invisibles) seront de médiocre qualité.
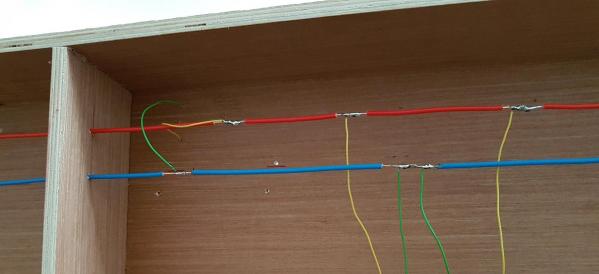
6-11- 2 le feeder
Un ou plusieurs feeders permettront la distribution de ce courant à chaque cartes.
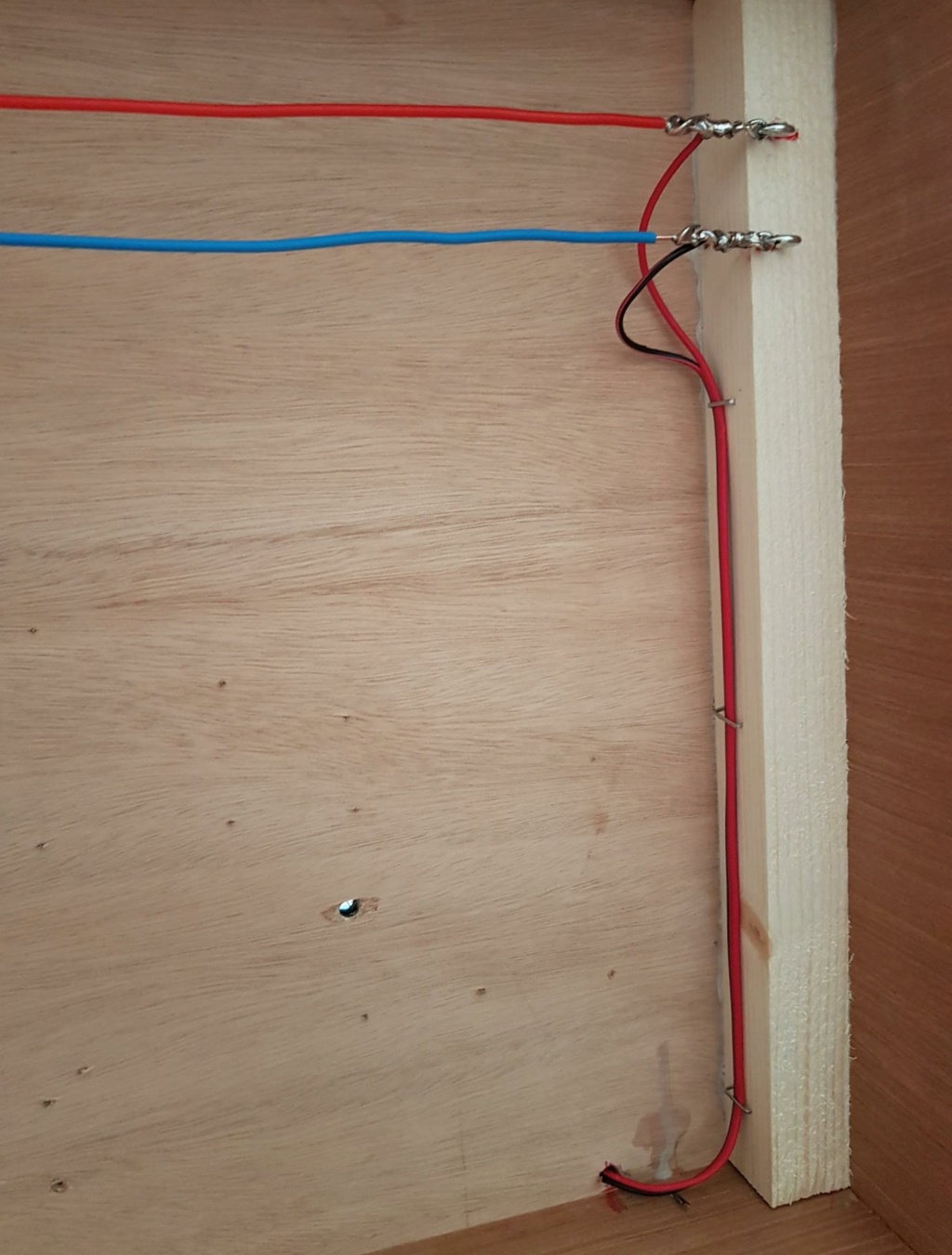
Pour rappel, un feeder est un câble de grosse section (1.5 à 2.5 mm2 à 2 fils pour les + et -) que l'on place sous le réseau, et sur lequel on va venir se repiquer avec des fils plus fin pour alimenter en courant continu chaque carte électronique. L'avantage est que ces deux « gros » fils limitent fortement les chutes de tensions et les mauvais contacts.... car leurs sections sont conséquentes.
La liaison en fil plus fin entre le feeder et la carte étant courte, le risque de soucis électrique est pratiquement réduit à néant.
Comme il faut absolument que toutes les alimentations et les cartes aient leur borne négative GND(-) connectées ensemble – et ceci sans exception - , au moins un feeder GND(-) serait une excellente solution.
Astuce importante : utilisez un code de couleur pour définir le « + » et le « - ».... Et tenez-vous y sans aucune exception.
6-11-3 PWM ou "modulation de largeur d'impulsion", quésako ?
La carte TM44 se chargera de convertir le courant continu constant reçu de la source pour injecter dans un canton soit de l'analogique PWM, soit du DCC selon la loco qui y est détectée.
La tension analogique PWM est du pseudo analogique généré par une modulation de sa largeur d'impulsion. La loco analogique roule nettement mieux.
PWM ou "modulation de largeur d'impulsion", quésako ?
Quand on veut faire varier la vitesse d’un moteur, la première idée qui vient à l’esprit est de faire varier la tension aux bornes du moteur. C'est ce qui était utilisé en analogique. Mais on constate que pour des valeurs faibles de la tension, le moteur ne tourne pas ou mal. Le moteur demande une tension minimale pour démarrer. Si cette dernière est trop basse, les forces électromagnétiques ne sont pas suffisantes pour vaincre le frottement. Il devient donc difficile d’ajuster la vitesse de façon précise. La solution à ce problème est astucieuse. Il suffit de fournir au moteur une tension qui est toujours la même soit la tension maximale ! Par contre, cette tension ne sera appliquée que par très courtes périodes de temps. En ajustant la durée de ces périodes de temps, on arrive à faire tourner plus ou moins vite les moteurs. Mieux, on remarque que la vitesse des moteurs devient
proportionnelle à la durée des périodes de temps. Contrôler la durée des périodes passées à la tension maximale par rapport au temps passé sans application de tension (tension nulle) est donc le cœur de la solution. En réalité, cette solution est déjà appliquée systématiquement en contrôle des systèmes et en électronique. Elle porte le nom de PWM (Pulse Width Modulation) ou Modulation par Largeur d'Impulsions (MLI).
Conclusions :
Et voilà, je crois que l'on a fait le tour de cet important chapitre.
Comme il n'y a que 3 cartes électroniques dans le système Dinamo, nous en avons déjà décrit en détails 66%.
Restera à passer à l'OC32 et d'être capable d'en gérer la puissance. Vous verrez, ce n'est pas plus complexe que ce qui précède du moment que l'on fait l'effort de comprendre l'idée du concepteur.
Il faut de l'ordre et de la méthode pour ne pas s’emmêler les pinceaux avec les adresses des cartes, des cantons et des sections. N'hésitez pas à faire un plan/tableau avant de passer aux paramétrages physiques, tant pour Dinamo que pour I-Train.
6-1 : préalable : le canton et ses sections
Chaque canton (appelé « bloc » dans Dinamo) doit être totalement isolé des autres et peut comporter jusqu'à 4 sections.
Un canton est constitué d'un rail continu « A » et d'un rail divisé en 4 sections isolées « B0 », « B1 », « B2 » et « B3 ».
Dinamo utilisera ces quatre sections pour déterminer avec précision où se trouve la loco dans le canton. C'est ce qu'on appelle la rétrosignalisation.
Il n'est cependant pas obligatoire de les utiliser toutes les quatre. Une, deux ou trois sont aussi acceptable.
Pas besoin d'accessoires, ce sont les rails et la loco qui est dessus qui vont fournir l'info à Dinamo.
Il ne peut y avoir qu'une seule loco (Dcc ou Analogique) sur un canton. C'est finalement le principe du cantonnement utilisé dans la réalité. Une traction double ne pourra être réalisée qu'avec des locos de même type ( Dcc ou analogique, mais pas de mix). Dinamo basculera automatiquement l'alimentation du canton concerné en conséquence.
6-2 : descriptif
La carte TM44 est livrée nue. Un cache existe et peut être commandé séparément. Les miennes étant placées sous la table de roulement et je n'ai pas trouvé nécessaire de me procurer les caches.
à sa droite, vous avez la possibilité de connecter 4 cantons (blocs) avec 5 connections à chaque fois, de gauche à droite (ordre à respecter) : le rail continu « A », et les 4 sections de rails « B0 », « B1 », « B2 » , »B3 ».
Les connecteurs des sections non utilisées sont laissés vides.
à sa gauche, vous avez une possibilité supplémentaire de connecter un OC32 (voir cette section), une entrée + une sortie pour les connecteurs RJ45 (réseau RS485), et l'alimentation en courant continu de la carte et des rails.
Référez vous au chapitre 2, « avantages ».
en haut, le sélecteur ( « dipswitches ») içi en rouge pour la personnalisation de la carte. Sa couleur peut changer selon la fabrication.
Les trous de fixations placés aux quatre coins ont un diamètre de 3mm.
Pour le montage sur un support, préférez des entretoises de minimum 10mm pour éviter d'écraser / faire des faux contacts entre le verso de la carte et le support sur lequel la carte sera fixée.
Attention aux faux contacts avec des entretoises non isolées.
On peut aussi empiler les cartes.
Veillez à laisser une distance suffisante entr'elles pour permettre de placer les fils de connexions et manipuler le sélecteur. Une hauteur d'entretoise M3 x 30mm minimum est recommandée par le constructeur.
Pas très compliqué
6-3 : le câblage entre le TM44 et les cantons.
Les 4 cantons (blocs) connectés sur une même carte peuvent se situer n'importe où dans le réseau et ne doivent pas nécessairement être contigus.
Il est recommandé de limiter la longueur du câble entre TM44 et les rails à un maximum de 10 mètres. Retenez cependant que ces cartes sont prévues pour être placées au plus près des cantons qu'elles dirigeront. Au plus près, au mieux !
Afin de minimiser autant que possible les interférences électromagnétiques, il est fortement recommandé de garder ensemble les fils d'un même canton (bloc), avec un câble multiconducteur séparé par canton. Sa section ne doit pas être importante si sa longueur reste sous les 2 mètres. Cependant, un câble trop fin génère une chute de tension, source d’un comportement inconstant des trains. Une section de 0,2mm2 sera le strict minimum. Notez que le câblage doit être capable de supporter un courant de court-circuit, courant qui est toujours assez important.
Les câbles téléphoniques / internet sont valable. Pour augmenter la section utile, on peut connecter les fils deux par deux. Tout dépendra du nombre de sections utilisées et du nombre de fils disponibles dans le câble.
Attention cependant, ceux avec des fils à âme pleine (rigide) cassent avec une facilité déconcertante au niveau des connexions. Je ne les utilise plus et préfère du câble réseau (UTP LAN) à âme souple. Leur niveau de catégorie est sans importance. Choisissez le moins cher.
Autre avantage, le fil torsadé a de meilleures propriétés dans les hautes fréquences.
Par sécurité, j'ai prévu du 0,5 mm2 (20AWG) avec des fils à âme souple.
Vous pouvez aussi utiliser des fils séparés. Il vaut mieux alors les torsader entre eux, canton par canton.
Du coté du rail, le mieux est de les y souder proprement du coté extérieur. Le ballast permettra de les dissimuler.
à retenir pour les connexions aux cantons :
* TM44 au plus près des cantons
* multiconducteur souple avec section des fils pas trop faibles.
* un multiconducteurs par canton.
* respecter la séquence de branchement ( A, B0, B1, B2, B3) sur le TM44
* le nombre de sections utilisées peut aller de un à quatre (B0 à B3)
6-4 : câblage du réseau RJ45 – RS485
Plus simple n'est pas possible : branchez. Il n'y a rien de plus à dire que ce qui a été explicité dans le chapitre 2 « cinquième avantage ».
Et j'en ajoute une couche :
La première carte se branche sur la sortie de la centrale RM-C. Ce sera une TM44 avec l'adresse primaire (0.0) ( cnf 6-6)
Un câble RJ45 arrive de la carte précédente, l'autre fait la connexion avec la suivante. Le choix de la prise RJ45 (gauche ou droite) utilisée n'a aucune importance. Le mix dans les cartes TM44 et OC32 est sans importance.
.....
ou
Ce réseau a trois fonctions :
* TM44 : assurer la transmission des instructions venant de l'ordinateur ( décodées par la centrale) aux rails et donc aux locos, avec retour de positionnement (retrosignalisation).
* OC32 : assurer la transmission des ordres venant de l'ordinateur ( décodées par la centrale) aux accessoires ( moteurs d' aiguillage, etc..).
* garder toutes les cartes synchronisées entre elles pour éviter l'anarchie.
Nb : Assurez-vous que les connecteurs RJ45 sont montés avec leurs 6 broches connectées.
6-5 Quelle est la dernière carte TM44 ou OC32 du réseau ?
Il faut signaler à la centrale quelle est la dernière carte TM44 ou OC32 qui est branchée sur le réseau, pour lui indiquer qu'elle ne doit pas chercher d'autres cartes plus loin. Ce sera celle qui n'a qu'une seule connexion RJ45 occupée.
Comme sur l'OC32, il faut chipoter sur des cavaliers ( les sélecteurs S7 et S8 ne fonctionnant pas sur cette carte) , il est plus simple de décider de placer une carte TM44 en dernier.
Si vous voulez quand même placer un OC32 en fin de circuit, reportez-vous à la section OC32 pour la gestion de ses cavaliers. Honnêtement, ce n'est pas sorcier. Juste qu'il faut des doigts agiles pour le placement correct des cavaliers.... et de savoir comment les placer ( pas les doigts, les cavaliers!).
Comment les utiliser ?
* Pour toutes les cartes : pour les TM44, cela se fait physiquement en mettant sur « OFF » les 7ème et 8ème sélecteurs du bloc rouge signalé sur le schéma TM44 ci-dessus. Attention : Les OC32 sont paramétrés sur « ON » en sortie d'usine. Il faut donc rectifier la position des cavaliers. Cnf 7-4
*Pour la dernière carte, celle qui n'a qu'une seule connexion RJ45 occupée : si c'est une TM44, mettre ses sélecteurs S7 et S8 sur ON. Si c'est une OC32, vérifiez la positions des cavaliers.Cnf 7-4
Nb : dans le jargon Dinamo, ces deux sélecteurs S7-S8 / cavaliers sont appelés «terminateurs/terminators».
Exercice complexe : trouver la carte «terminator/ terminateur» dans le schéma réseau ci-dessus
Vraiment complexe, n'est il pas ?
6-6 : adresses des cartes TM44 :
On parle içi uniquement des adresses des cartes TM44 ( et pas des cantons ni des sections).
Chaque carte TM44 doit avoir une adresse exclusive, sans doublon.
Notez que une carte TM44 et une carte OC32 peuvent avoir la même adresse car elles sont de deux familles totalement différentes. On peut donc ignorer totalement les cartes OC32 dans les explications qui suivent.
Rugueuse et étrange numérotation par DINAMO qui vient d'anciennes contraintes informatiques. Après tout, pourquoi pas.
Les adresses possibles sont :
On dispose de 32 adresses pour les cartes TM44.
Nb : J'ai posé sur chaque carte TM44 un autocollant numéroté de 1 à 32
Sur la figure, vous voyez que les adresses sont groupées en duo « primaire » et « secondaire ». Pas de stress, il n'y a pas de différence de performance entre une carte avec adresse primaire ou secondaire.
Attention, remarques importantes :
* Aucun doublon dans les adresses des TM44.
* L'adresse n° (0.0) doit toujours exister. Ce sera la première carte branchée sur la centrale RM-C.
* vous ne pouvez pas utiliser une adresse secondaire si son équivalent en adresse primaire n'existe pas. Par exemple, on peut utiliser l'adresse secondaire 3.1 uniquement si l'adresse primaire 3.0 a été utilisée.
-->En conséquence, si un seul TM44 est assigné à un duo d'adresses, il doit avoir une adresse primaire, l'adresse secondaire restant inutilisée. Cela arrive par exemple en cas d'un nombre impair de cartes TM44.
-->En conséquence, une ou des adresses secondaires peuvent ne pas être utilisées.
* il n'est pas indispensable que les adresses des cartes TM44 se suivent si on respecte la contrainte précédente.
* Garder un ordre séquentiel continu accélérera le travail de collecte /envois des infos/instructions effectué par l'ordinateur et la centrale. On élimine en effet les temps de recherches sur des cartes / adresses inexistantes.
Ces adresses sont définies avec les 5 premiers sélecteurs ( S1 à S5) du bloc rouge sur la carte TM44 montrée ci-dessus.
n.b. : les adresses des cartes sont chargées une fois pour toute lors de la mise sous tension de la centrale RM-C/1+. Si vous voulez modifier l'adresse d'une carte, il vous faudra éteindre et relancer la centrale pour que votre modification devienne active.
6-7 TM44 Maître / Esclaves
50 nuances de grey ?
Les TM44 doivent être parfaitement synchronisés pour éviter un court-circuit lorsqu'un train passe d'un bloc à un autre. Pour y parvenir, un seul et unique TM44 dirigera tous les autres qui lui obéiront.
Comment procéder ?
* mettre le 6ème sélecteur (S6) du bloc rouge sur ON sur la carte TM44 ayant l'adresse primaire (0.0). Ce sera le « Maitre »
* mettre ce 6ème sélecteur (S6) sur OFF sur toutes les autres cartes TM44. Ce seront les esclaves.
6-8 résumé pour les 8 sélecteurs du bloc rouge d'une carte TM44
pour TM44 uniquement :
* S1 + S2 + S3 + S4 + S5 = sélection d'une adresse exclusive.
* S6 = ON sur la carte avec adresse 0.0, OFF sur toutes les autres.
pour TM44 ET OC 32 :
* S7 + S8 = les deux sélecteurs sur ON sur la dernière carte (TM44 ou OC32) du réseau, et sur OFF pour toutes les autres cartes (TM44 et OC32).
6-9 : adresses des cantons dans une carte TM44 :
Reste maintenant à définir l'adresse d'un canton.
I-Train va nous simplifier fortement la vie en rendant cette numérotation conviviale.
Cette adresse doit être unique et est attribuée automatiquement par Dinamo. Elle sera utilisée par votre logiciel de contrôle et permettra de la relier aux numéros de retro-signalisation signalant l'occupation d’une section par un train.
Vous suivez ?
Une carte TM44 a une adresse exclusive ( soit un n° primaire ou soit un n° secondaire) --> qui la relie aux 4 cantons qu'elle gère --> chaque canton surveille 4 sections de détection de présence (rétrosignalisation).
Pour se rafraîchir les idées, rappel du schéma d'un canton sachant qu'il y en a 4 sur une carte TM44 :
Vous vous souvenez aussi de la figure avec les 4 groupes de connecteurs cantons présents sur une carte TM44 :
I-train a clarifié la situation en travaillant avec une numérotation modulaire.
Ce qui veut dire que pour la carte TM44 avec l'adresse primaire (0.0) , le premier canton a le n° 1, le deuxième le n°2, le troisième le n° 4, le quatrième le n°5.
Et ainsi de suite.
Simplissime !
6-10 : adresses des 4 sections d'un canton dans une carte TM44 :
Içi aussi, I-train a tout simplifié.
Les sections sont numérotées (x.1) – (x.2) – (x.3) – (x.4)
ex : dans le canton I-Train n°1, les sections sont (1.1) - (1.2) - (1.3) – (1.4)
dans le canton I-Train n°2, les sections sont (2.1) - (2.2) - (2.3) – (2.4)
dans le canton I-Train n°27, les sections sont (27.1) - (27.2) - (27.3) - (27.4)
etc...
Exemple de paramétrage d'une section de détection de présence (rétrosignalisation) dans un canton I-train :
il s'agit
* pour dinamo de la section b2 du canton 0 de la carte principale n° 0.0
* pour i-train de la section 3 du canton 1 qu'il nomme 1.3
C'est quand même nettement plus convivial dans I-Train. Or, c'est que l'on utilise en pratique. Ouf.
Si vous utilisez un autre logiciel que I-Train, qui pourrait ne pas suivre une numérotation modulaire mais une numérotation linéaire, veuillez vous référer au mode d'emploi officiel section 5.3.1 « Adressage du TM44 ».
6-11 : l'alimentation électrique des cartes et du réseau
Encore une simplification, dans Dinamo cette fois.
Chaque carte est alimentée séparément en courant continu.
Vous pouvez utiliser plusieurs sources d'alimentation, avec un mix éventuel entre TM44 et OC32.
Important : Assurez-vous que les pôles négatifs GND (-) de toutes les alimentations utilisées sont tous connectés les uns aux autres ET aux bornes GND (-) des cartes Dinamo.
C'est déjà le cas en interne pour toutes les cartes Dinamo.
6-11- 1 la source en courant continu :
un transfo avec sortie courant continu ou mieux, une alimentation à découpage adaptée (14v- 18v, 200w pour 10 locos HO) se trouve facilement sur internet à un prix très raisonnable.
Pour l'échelle N, on recommande une tension de 14V et pour l'échelle Z de 10V à 13V Considérez qu'une loco HO consomme 1A, la moitié moins en N. Il faut y ajouter les besoins pour les moteurs d'aiguillages et tous les autres accessoires. La puissance se calcule par la formule
Puissance = Tension en Volt (ex : 14) x Courant en Ampère.
Vous pouvez utiliser plusieurs alimentations selon la puissance totale nécessaire. Il suffit de relier toutes les bornes « - » ensemble.
Une suggestion pour les grands réseaux : une ou plusieurs alimentations pour la traction (TM44) et une séparée pour les accessoires (OC32). Ceci implique plusieurs feeders séparés (cnf 6-11-2).
Attention : Faite le choix d'une marque réputée style MeanWell plutôt que le prix chinois dont les composants internes (invisibles) seront de médiocre qualité.
6-11- 2 le feeder
Un ou plusieurs feeders permettront la distribution de ce courant à chaque cartes.
Pour rappel, un feeder est un câble de grosse section (1.5 à 2.5 mm2 à 2 fils pour les + et -) que l'on place sous le réseau, et sur lequel on va venir se repiquer avec des fils plus fin pour alimenter en courant continu chaque carte électronique. L'avantage est que ces deux « gros » fils limitent fortement les chutes de tensions et les mauvais contacts.... car leurs sections sont conséquentes.
La liaison en fil plus fin entre le feeder et la carte étant courte, le risque de soucis électrique est pratiquement réduit à néant.
Comme il faut absolument que toutes les alimentations et les cartes aient leur borne négative GND(-) connectées ensemble – et ceci sans exception - , au moins un feeder GND(-) serait une excellente solution.
Astuce importante : utilisez un code de couleur pour définir le « + » et le « - ».... Et tenez-vous y sans aucune exception.
6-11-3 PWM ou "modulation de largeur d'impulsion", quésako ?
La carte TM44 se chargera de convertir le courant continu constant reçu de la source pour injecter dans un canton soit de l'analogique PWM, soit du DCC selon la loco qui y est détectée.
La tension analogique PWM est du pseudo analogique généré par une modulation de sa largeur d'impulsion. La loco analogique roule nettement mieux.
PWM ou "modulation de largeur d'impulsion", quésako ?
Quand on veut faire varier la vitesse d’un moteur, la première idée qui vient à l’esprit est de faire varier la tension aux bornes du moteur. C'est ce qui était utilisé en analogique. Mais on constate que pour des valeurs faibles de la tension, le moteur ne tourne pas ou mal. Le moteur demande une tension minimale pour démarrer. Si cette dernière est trop basse, les forces électromagnétiques ne sont pas suffisantes pour vaincre le frottement. Il devient donc difficile d’ajuster la vitesse de façon précise. La solution à ce problème est astucieuse. Il suffit de fournir au moteur une tension qui est toujours la même soit la tension maximale ! Par contre, cette tension ne sera appliquée que par très courtes périodes de temps. En ajustant la durée de ces périodes de temps, on arrive à faire tourner plus ou moins vite les moteurs. Mieux, on remarque que la vitesse des moteurs devient
proportionnelle à la durée des périodes de temps. Contrôler la durée des périodes passées à la tension maximale par rapport au temps passé sans application de tension (tension nulle) est donc le cœur de la solution. En réalité, cette solution est déjà appliquée systématiquement en contrôle des systèmes et en électronique. Elle porte le nom de PWM (Pulse Width Modulation) ou Modulation par Largeur d'Impulsions (MLI).
Conclusions :
Et voilà, je crois que l'on a fait le tour de cet important chapitre.
Comme il n'y a que 3 cartes électroniques dans le système Dinamo, nous en avons déjà décrit en détails 66%
Restera à passer à l'OC32 et d'être capable d'en gérer la puissance. Vous verrez, ce n'est pas plus complexe que ce qui précède du moment que l'on fait l'effort de comprendre l'idée du concepteur.
Dernière modification par oups65 le 29 juin 2021, 18:54, modifié 13 fois.
OUPS65
membre AFAN et AGP3D, I-TRAIN - centrale DINAMO RM-C + TM44 et OC32/GN - imprimantes 3D ELEGOO Saturn et MK3S
membre AFAN et AGP3D, I-TRAIN - centrale DINAMO RM-C + TM44 et OC32/GN - imprimantes 3D ELEGOO Saturn et MK3S
-
thierry
- Messages : 651
- Inscription : 26 févr. 2014, 23:32
- Type de centrale : Analogique
- Localisation : Lierneux
Re: Dinamo = analogique + digital
Merci pour tes explications J'avais déjà téléchargé les instructions sur leur site. Et j'étais un peu perdu, surtout pour la partie paramétrage avec itrain. Maintenant c'est plus clair. Il est grand temps que je monte un réseau pour tester ça.
-
oups65
- Messages : 322
- Inscription : 01 oct. 2013, 17:45
- Type de centrale : Analogique et numérique
- Localisation : TOURNAI
Re: Dinamo = analogique + digital
attention, il reste encore la troisième carte, la OC32. Elle est indispensable par exemple pour les aiguillages.
Je suis en cours de mise en page, mais comme il va faire beau ....
Je suis en cours de mise en page, mais comme il va faire beau ....
OUPS65
membre AFAN et AGP3D, I-TRAIN - centrale DINAMO RM-C + TM44 et OC32/GN - imprimantes 3D ELEGOO Saturn et MK3S
membre AFAN et AGP3D, I-TRAIN - centrale DINAMO RM-C + TM44 et OC32/GN - imprimantes 3D ELEGOO Saturn et MK3S
-
thierry
- Messages : 651
- Inscription : 26 févr. 2014, 23:32
- Type de centrale : Analogique
- Localisation : Lierneux
Re: Dinamo = analogique + digital
C'est la première fois que j'attends le mauvais temps avec impatience 

-
oups65
- Messages : 322
- Inscription : 01 oct. 2013, 17:45
- Type de centrale : Analogique et numérique
- Localisation : TOURNAI
Re: Dinamo = analogique + digital
chapitre 7 : OC32/NG et la gestion des accessoires
7-1 principe et descriptif
Cette carte – un micro ordinateur sans clavier ni écran- est un peu le couteau suisse du système tant ses possibilités sont étendues. Elle prend en charge la commande des moteurs d'aiguillages, la signalisation, l'illumination, les boutons poussoirs, les relais, peut simuler une soudure à l'arc, etc...bref, tout ce qui ne concerne pas la gestion des cantons (réalisée par le TM44).
Ses 32 broches de commande d'entrée/sortie peuvent être pilotées individuellement et indépendamment les unes des autres. Elles sont électriquement subdivisées en 4 groupes de 8 broches. Les propriétés électriques de chaque groupe peuvent être définies en choisissant le boîtier pilote (appelé « driver » chez Dinamo) adéquat en fonction des propriétés désirées. Un boîtier pilote est un module électronique (ADM) ou un circuit intégré (IC) qui sera enfiché sur l'OC32.
Couteau suisse, donc fatalement beaucoup de possibilités à expliciter et à maîtriser.
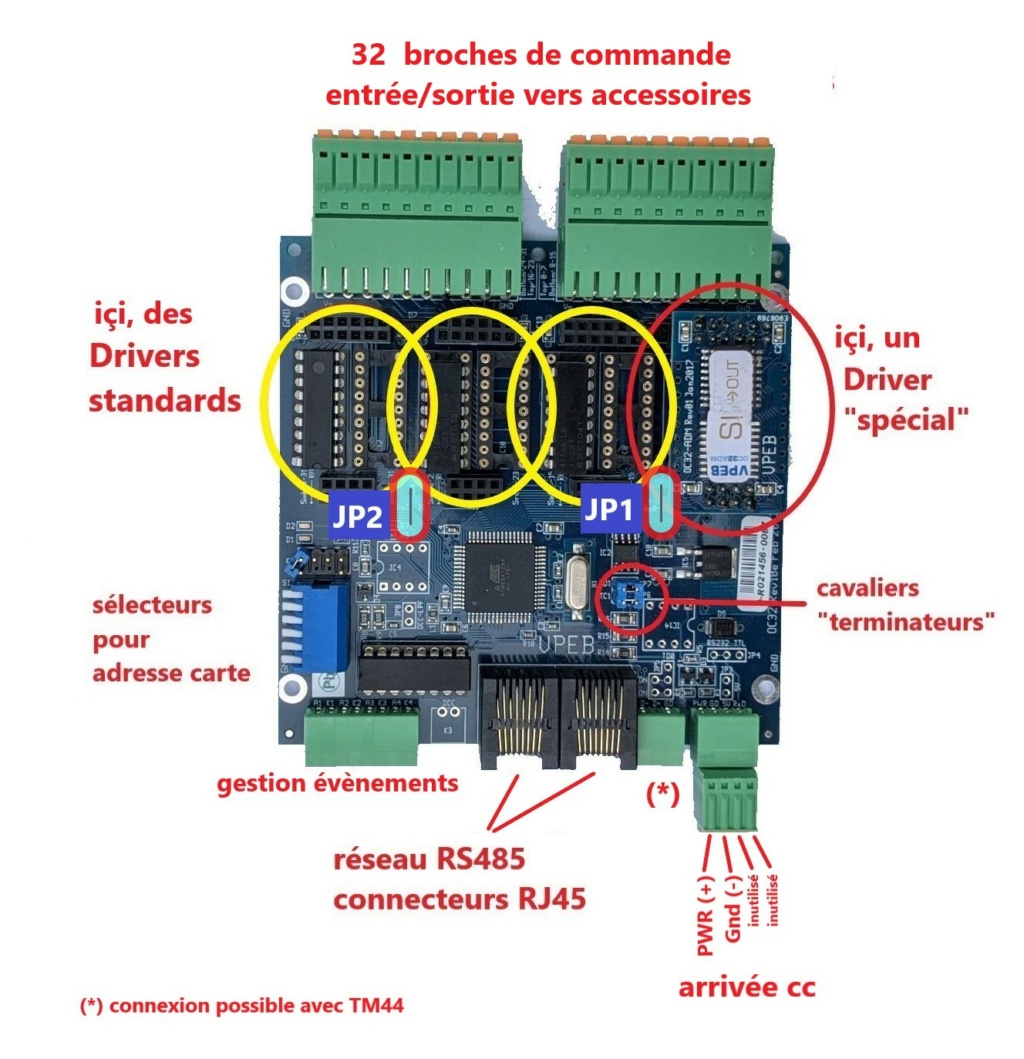
Quand vous achetez un OC32, vous le recevez avec 4 boîtiers pilotes standards pré-montés. Dans certains cas, il vous faudra des drivers plus spécifiques à acheter séparément, comme celui représenté à droite de la figure ci-dessus ( un ADM/SI). Ils sont facile à monter par emboîtement sur la carte. Ce sera développé en 7-7.
Comme d'hab, placez votre carte au plus près des accessoires à commander.
ATTENTION : une carte OC32 ne peut supporter en continu qu'un courant total de maximum 3A, à répartir entre ses 32 broches de commande.
7-2 le branchement sur les broches de commande.
Pour chaque groupe vous avez en réalité une première broche commune GND (-), suivie des 8 broches de commande, suivies d'une broche commune Vp (+).
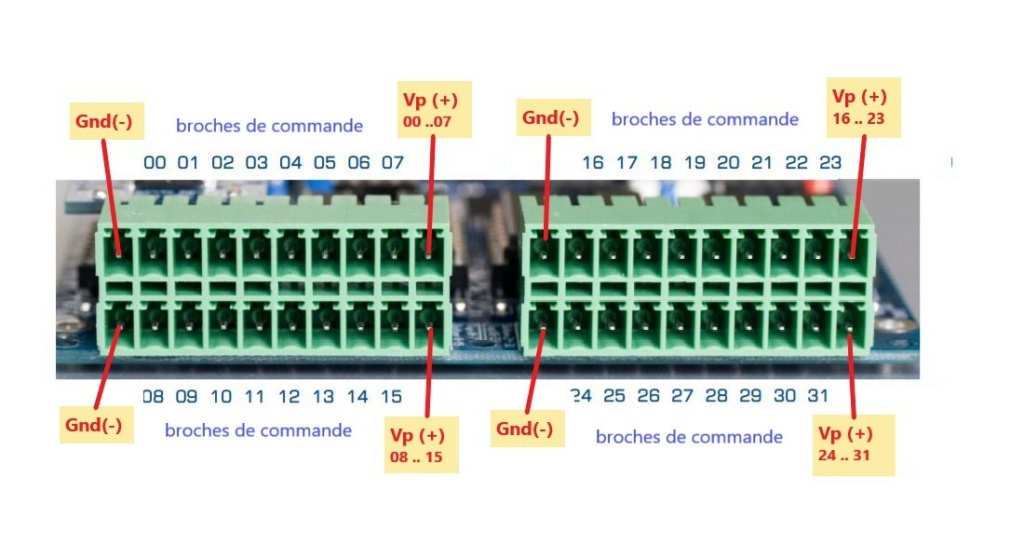
L'accessoire (ex une led ou une bobine de solénoïde), se branchera soit entre Vp (+) et une broche de commande, soit entre GND (-) et une broche de commande. Cela dépendra du boîtier pilote que vous aurez installé.
Une contrainte à respecter : ne pas mélanger le connexions entre les quatre groupes. Exemple d’erreur à ne pas commettre : un accessoire branché sur le Vp (+) du groupe n°1 et sur une broche de commande du groupe n°2.
7-3 alimentation d'entrée de la carte et des broches de commande.
7-3-1 généralités
Tout ce qui a été expliqué pour le TM44 reste valable pour l'OC32, chaque carte recevant sa propre alimentation en courant continu. Le feeder refait içi son apparition ( cnf sixième avantage du chapitre 2).
Vous pouvez évidement utiliser plusieurs sources d'alimentation ou tout alimenter avec le même feeder.
On considère qu'une puissance de 2A est généralement suffisante pour débuter.
Petit rappel de branchement :
comment finaliser le feeder :
C'est une bonne idée d'avoir au moins un feeder Gnd (-) de manière relier toutes les bornes Gnd (-) de toutes les alimentations et de toutes les cartes.

Cette carte accepte une tension en courant continu comprise entre 7V et 20V, 15v étant conseillé par le constructeur.
Si vous avez des appareils qui ont absolument besoin d'un courant alternatif, utilisez un relais pour les piloter.
Selon les besoins de vos accessoires, la tension utilisée pour un ou des OC32 peut être différente de celle utilisée pour vos TM44 ou même des autres OC32. Vous pouvez aussi créer un feeder spécifique pour vos OC32, ou les brancher directement sur vos alimentations en courant continu.
7-3-2 deux tensions différentes sur les broches de commande
La tension de sortie appliquée sur les broches de commande est réglée en usine pour être la même que celle que vous appliquez à l'entrée de la carte OC32. Or c'est cette tension qui pilotera vos accessoires.
Il est possible de la moduler en séparant électriquement les broches de commande n° 0 à 15 des broches de commande n° 16 à 31 ou séparer le tout de la tension d'entrée.
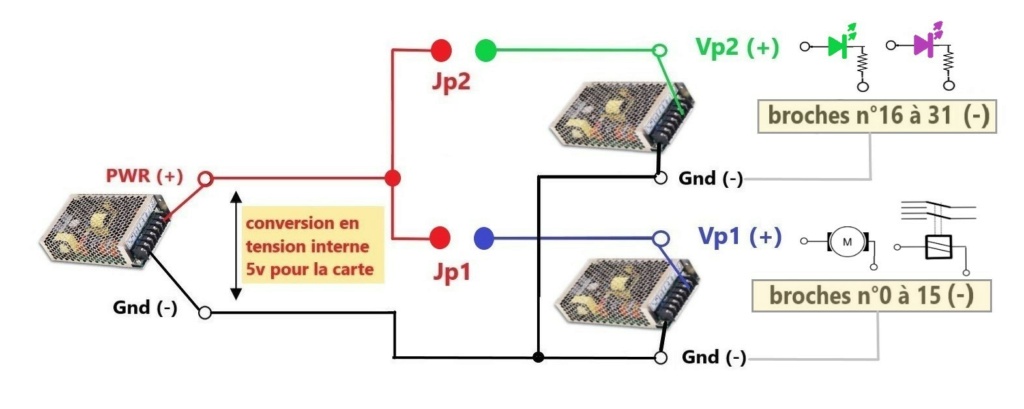
La carte OC32 possède à cet effet 2 cavaliers (JP1 et JP2) permettant cette gestion des tensions :
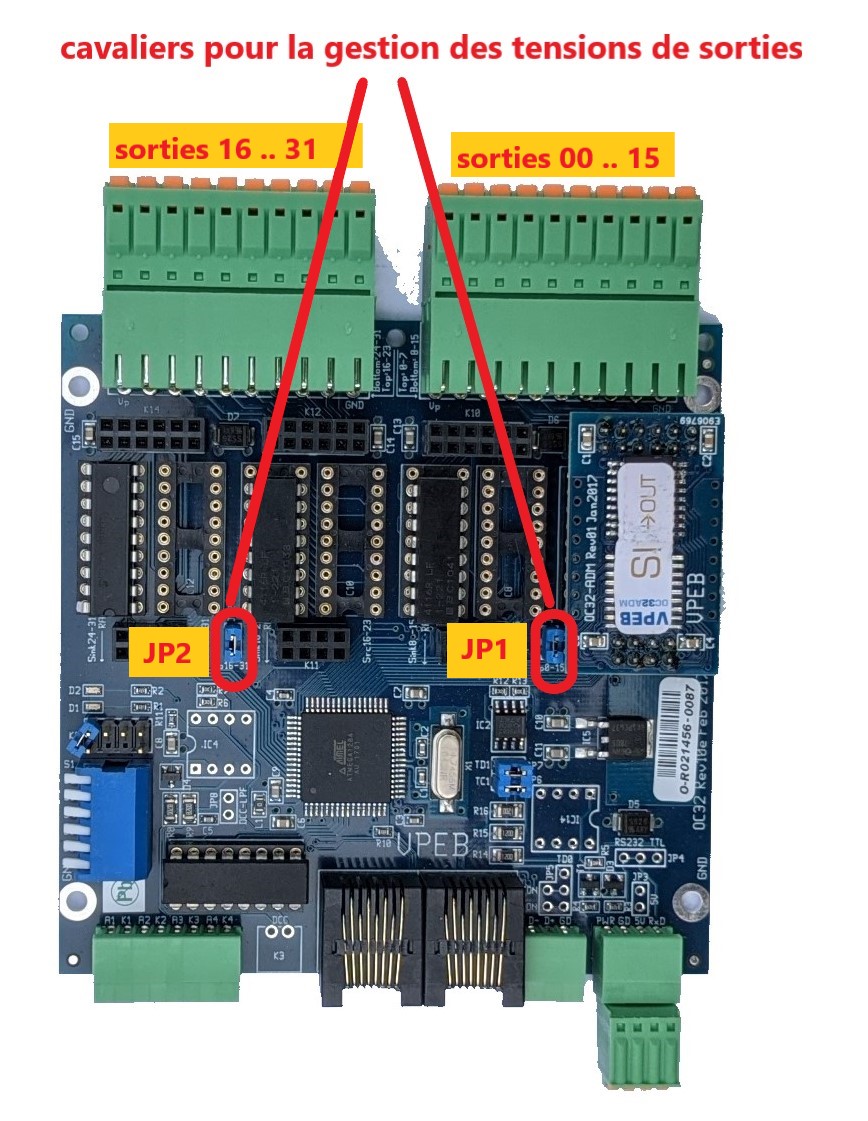
Regardez maintenant ce schéma des liaisons électriques tel que reçu à l'achat :
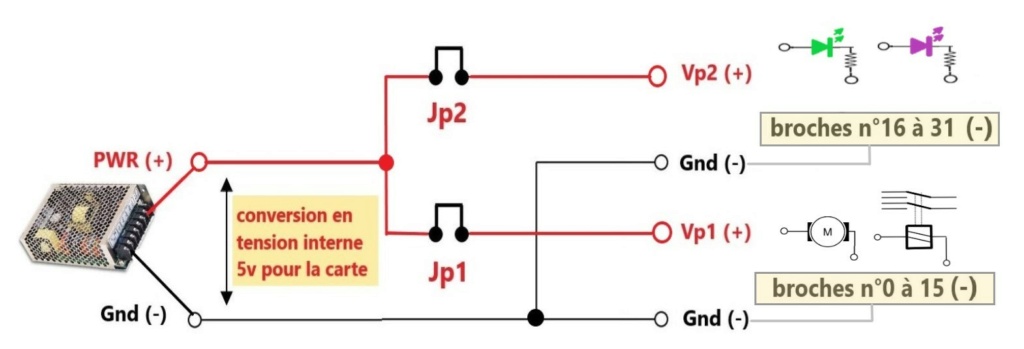
on y voit que la tension d'entrée PWR (+) est communiquée aux bornes de commande Vp1 et Vp2 via les cavaliers JP1 et JP2. Si vous retirez un ou les deux cavaliers, vous isolez électriquement les bornes de commande correspondantes du reste de la carte.
Vous pouvez alors brancher une alimentation externe sur cette borne de commande Vp1 et/ou Vp2. Leurs deux tensions peuvent être différentes de celle d'entrée PWR.
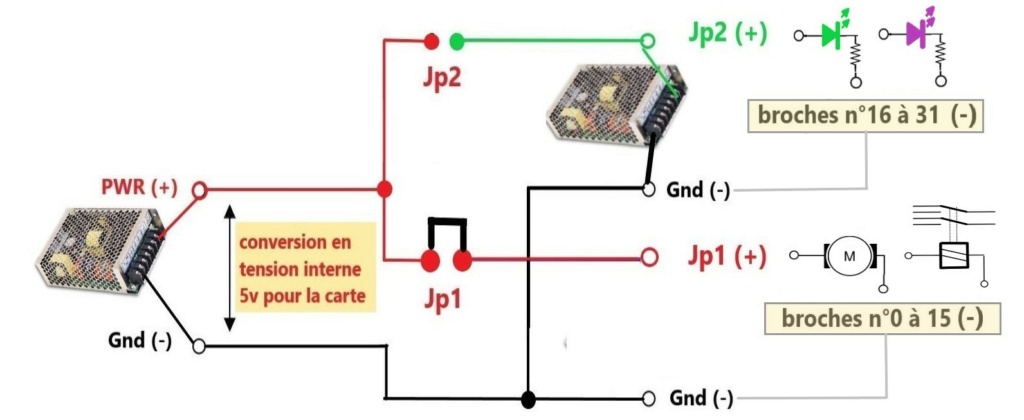
Les différentes combinaisons possibles sont reprises ci-dessous :
cavalier JP1 retiré, cavalier JP2 connecté : Vp1 peut être alimenté séparément.
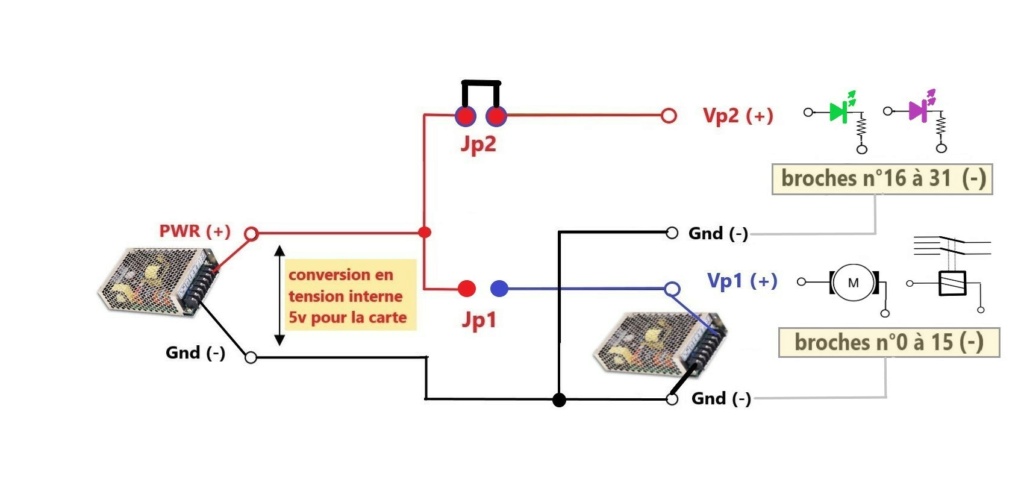
cavalier JP2 est retiré, cavalier JP1 est connecté : Vp2 (+) peut être alimenté séparément.
cavalier JP1 est connecté ET Vp1(+) est alimenté séparément, cavalier JP2 est retiré ET VP2 (+) est alimenté séparément : interdiction de brancher une alimentation en entrée sur PWR (+). La carte est alimentée en interne au départ de Vp1 (+)
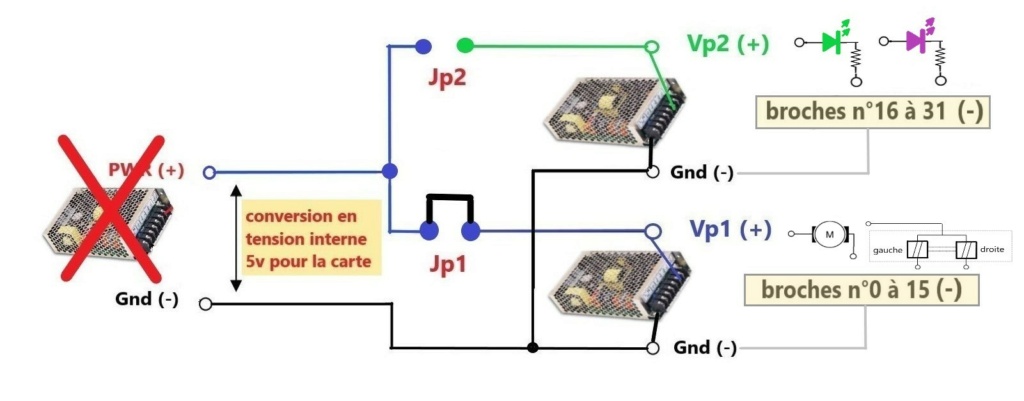
cavalier JP2 est connecté ET Vp2 (+) est alimenté séparément, cavalier JP1 est retiré ET VP1 (+) est alimenté séparément : interdiction de brancher une alimentation en entrée sur PWR (+). La carte est alimentée en interne au départ de Vp2 (+)
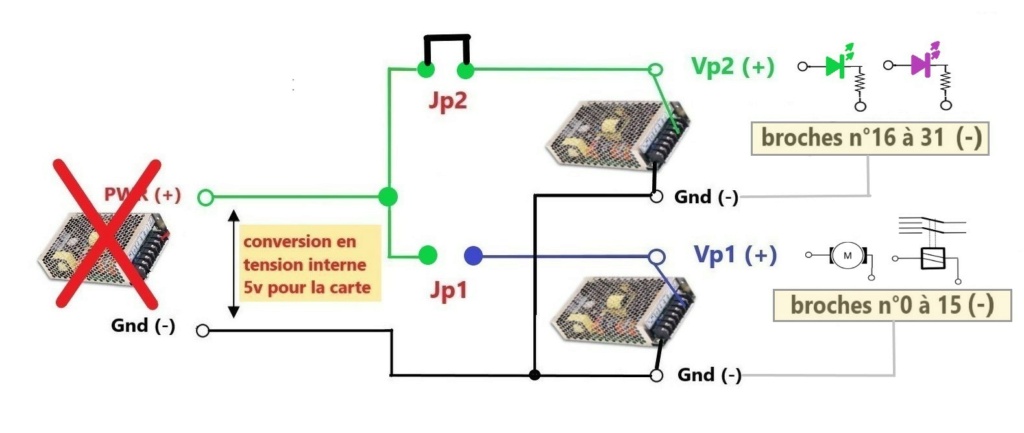
n.b. : si vous retirez les deux cavaliers JP1 et JP2, la tension d'entrée PWR (+) ne servira que pour alimenter la carte OC32 en interne, cette tension d'entrée étant convertie en interne en 5v.
Rappel : la tension d'entrée à appliquer sur la carte est de minimum 7volts en courant continu (cc) stabilisé
Important : Assurez-vous que les pôles négatifs GND (-) de toutes les alimentations utilisées sont tous connectés les uns aux autres ET aux bornes GND (-) des cartes Dinamo.
C'est déjà le cas en interne pour chaque carte Dinamo.
Un feeder GND(-) serait dès lors une excellente solution.
7-3-3 un nombre infini de tensions sur les broches de commande
Le nombre de tensions d'alimentations différentes est pratiquement illimité avec l'utilisation des boîtiers pilotes SINK Driver que vous découvrirez ci-après.
Après avoir retiré le cavalier Jp1 et/ou Jp2 adhoc ( cnf 7-3-2), l'accessoire sera connecté d'une part à une broche de commande (-) de l'OC32 et d'autres part non plus sur la borne Vp (+) , mais directement au pôle positif de l'alimentation externe désirée.
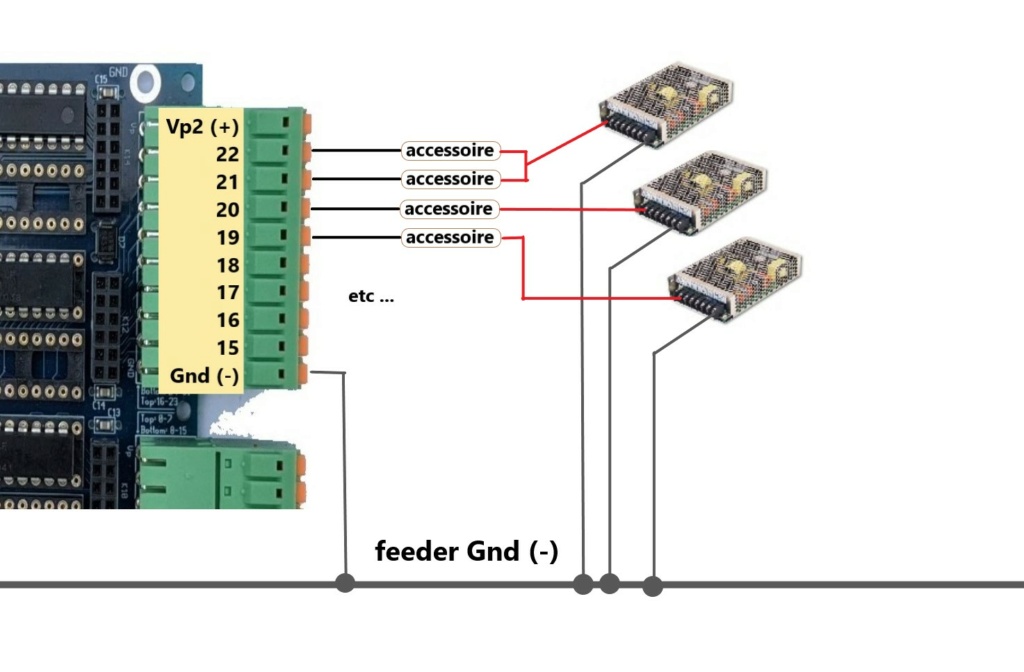
Aussi longtemps que le pôle négatif GND (-) de toutes ces alimentations sont connectés les uns aux autres et au GND (-) de la OC32, le pôle positif de chacune de ces alimentations peut en effet être utilisé pour alimenter séparément un ou plusieurs accessoires.
n.b. : valable exclusivement avec les boîtiers pilotes SINK Driver à l'exclusion des autres.
Franchement, peut-on faire plus flexible ?
7-4 branchement au réseau RS485/RJ45 pour le pilotage des cartes.
Simplissime. Reportez-vous au chapitre 6. Tout y est expliqué.
Le mix entre TM44 et OC32 est laissé à votre libre choix. Il suffit de brancher les cartes les unes aux autres avec les câbles RJ45 adhoc pour obtenir une communication bi-directionnelle.
7-5 Terminateurs à activer ou à désactiver
La dernière carte est celle qui n'a qu'un seul connecteur RJ45 branché, l'autre restant vide.
Si tel est le cas pour votre OC32, vous devez activer ses « terminateurs ». Sinon, vous devez désactiver ses « terminateurs »
Pour activer le terminateur (ON), placez les deux cavaliers comme indiqué dans la figure ci-dessus. Faites attention à ne pas les insérer en les décalant de 90 degrés, car votre réseau ne fonctionnera plus.
Pour désactiver le terminateur (OFF), retirez les deux cavaliers. Si vous ne voulez pas perdre les cavaliers lorsque les terminateurs sont désactivés, vous pouvez placer chaque cavalier sur une seule broche en laissant l'autre partie du cavalier « dans le vide ».
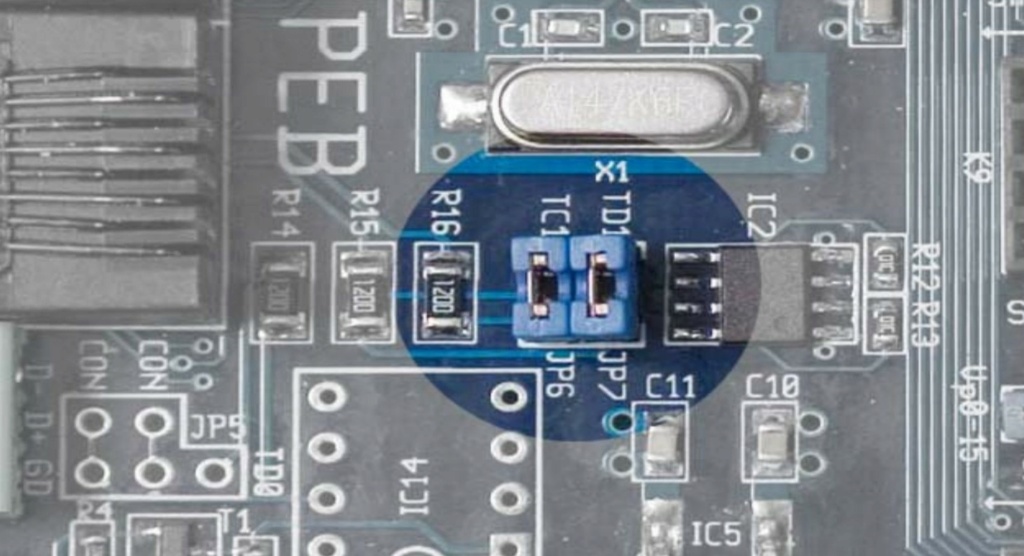
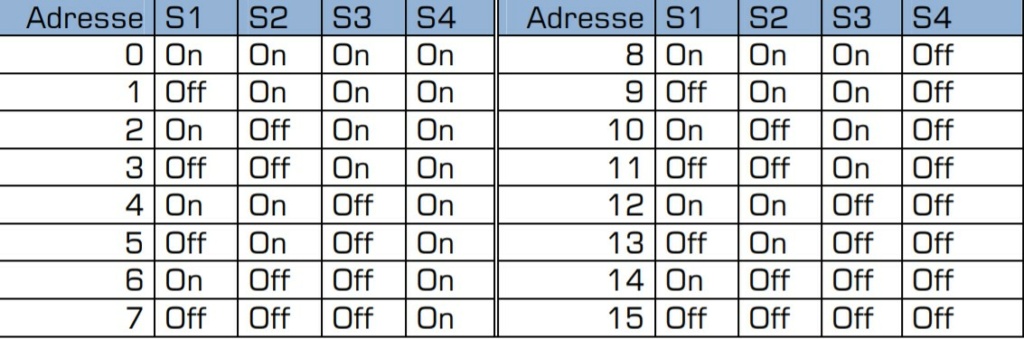
7-6 définir l'adresse de votre OC32
Vous pouvez connecter un maximum de 16 modules OC32 par système Dinamo P & P.
Chaque carte OC32 doit avoir une adresse exclusive, sans doublon.
Notez que une carte TM44 et une carte OC32 peuvent avoir la même adresse car elles sont de deux familles totalement différentes.
L'adresse est sélectionnée avec des 6 commutateurs DIP. ( voir 7-1) dont seuls les quatre premiers sont utilisés.
Comme c'est le cas avec le TM44, gardez en mémoire que certain logiciel de gestion sur le PC ajuste toutes les adresses avec +1. Vérifiez sur le logiciel.
n.b. : les adresses des cartes sont chargées une fois par cession lors de la mise sous tension de la centrale RM-C/1+. Si vous modifiez l'adresse d'une carte, il vous faudra ensuite éteindre et relancer la centrale pour que votre modification devienne active.
Remarque finale : il est possible d'utiliser jusqu'à 96 OC32 avec des adresses étendues. Dans ce cas, les 6 dipswitchs ne sont plus utilisés, mais tout est géré par une configuration spéciale injectée dans la mémoire flash de l'OC32. Il faut aussi que votre logiciel sur le PC puisse gérer cette possibilité. C'est pointu et réservé aux pros que je renvoie à la doc en anglais/néerlandais du site du constructeur.
7-7 les boîtiers pilotes ( Drivers).
On arrive au poumons de l'OC32, son cœur étant le processeur que nous analyserons par après.
Nous avons vu en 7-1 que la carte possède 4 zones de triples emplacements pour y insérer soit des modules électroniques (ADM) ou des circuits intégrés (IC) .
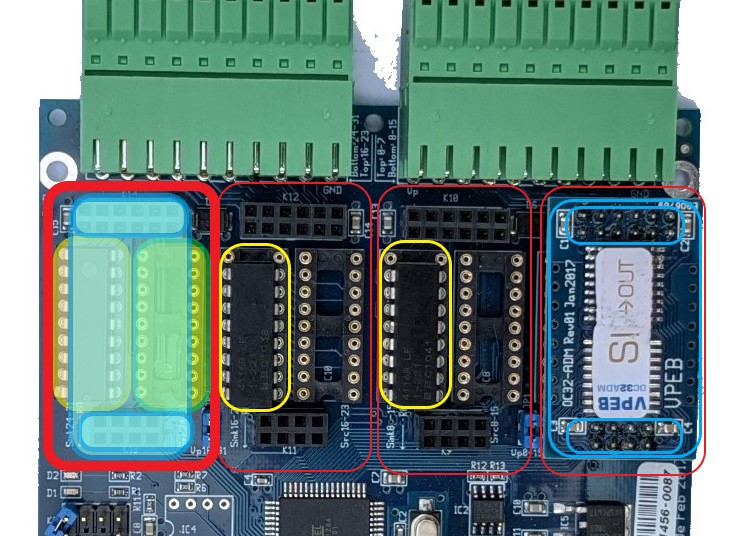
une zone est cerclé de rouge, avec l'emplacement de gauche en jaune ( appelé « sink » par Dinamo) , de droite en vert ( appelé « source » par Dinamo) et le troisième en bleu ( appelé « AMD » par Dinamo).
Vous ne pouvez utiliser qu'un seul emplacement par zone, sauf exception expliquée plus tard. Le fait de laisser les autres vides dans une même zone ne pose évidement aucun soucis.
Pour installer un nouveau boîtier pilote, le maître mot est « délicatesse ». : a / couper le courant b/ vérifier le sens dans lequel vous enchâssez le boîtier pilote c/ vérifier que toutes ses pattes sont parfaitement emboîtées d/ vous pouvez rebrancher.
Les pilotes disponibles sont :
d'abord les deux plus importants :
7-7-1 Sink Drivers 500mA (TBD62083).
Ce sont les trois de gauche au point 7-1.
C'est le pilote standard livré d'usine avec la carte car son usage est universel.
Son emplacement est dans la partie jaune (à gauche) de la zone.
Les 8 broches de commande du groupe alimenté par ce boîtier pilote sont au potentiel négatif (-).
Chaque broche de commande peut délivrer 500mA, MAIS le total des 8 broches concernées ne peut dépasser 1A en même temps.
L'accessoire sera connecté entre Vp (+) et une des 8 broches de commande (sortie 500mA) du même groupe qui jouera le rôle du pôle négatif (-).
Ex :
7-7-2 OC32-ADM/SI (4,8A power sink-driver)
C'est celui présenté à droite au point 7-1.
Son emplacement est dans la partie bleue de la zone.
Les 8 broches de commande du groupe alimenté par ce boîtier pilote sont au potentiel négatif (-).
Il est à utiliser lorsque le courant nécessaire est supérieur à 500mA, par exemple pour le solénoïde d'un moteur d’aiguillage.
Chaque sortie peut fournir 4,8A comme maximum absolu
Attention : il s'agit d'un courant de pointe. La charge continue doit être maintenue en dessous de 2A par broche et moins de 3A de courant total pour un OC32.
L'accessoire sera connecté entre Vp (+) et une des 8 broches de commande du même groupe qui jouera le rôle du pôle négatif (-).
Ex :
si vous avez des contacts de fin de course, prévoyez des condensateurs comme représentés ci-dessous

ensuite les autres :
7-7-3 Source Drivers 500mA (TBD62783)
Son emplacement est dans la partie verte (à droite) de la zone.
Les 8 broches de commande du groupe alimenté par ce boîtier pilote sont au potentiel positf (+).
Chaque broche peut délivrer 500mA, MAIS le total des 8 broches concernées ne peut dépasser 1A en même temps.
L'accessoire sera connecté entre GND (-) et une des 8 broches de commande (sortie 500mA) du même groupe qui jouera le rôle du pôle positif (+).
Peu utilisé, sauf dans des cas particuliers tel qu'un moteur demandant une inversion de polarité à ses bornes pour inverser son sens de rotation.
Dans ce cas, il faut monter en même temps un Sink driver et un Source driver dans le même groupe. Attention que les deux drivers ne pourront jamais être activés en même temps, sous peine de destruction immédiate. La gestion des drivers est expliqué dans le chapitre sur la programmation du processeur de l'OC32.
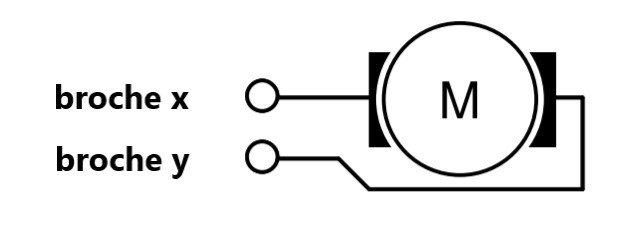
Le moteur sera branché sur deux broches de commande dont les polarités seront inversées par le processeur pour inverser son sens de rotation.
Il faudra être parfaitement sûr de sa programmation pour éviter tout clatch !
7-7-4 OC32-ADM/SO (4,8A power source-driver)
Son emplacement est dans la partie bleue de la zone.
Les 8 broches de commande du groupe alimenté par ce boîtier pilote sont au potentiel positif (+).
Il est à utiliser lorsque le courant nécessaire est supérieur à 500mA.
Chaque sortie peut fournir 4,8A comme maximum absolu
Attention : il s'agit d'un courant de pointe. La charge continue doit être maintenue en dessous de 2A par broche et moins de 3A de courant total pour un OC32.
L'accessoire sera connecté entre GND (-) et une des 8 broches de commande du même groupe qui jouera le rôle du pôle positif (+).
7-7-5 Resistor Array (5V outputs)
Ce n'est pas un véritable boitier pilote mais simplement un groupe de résistances mises dans un boitier de CI ( DIL16 version avec résistances individuelles de valeur minimale supérieure à 100 ohms). La valeur des résistances est à votre libre choix selon vos besoins.
Comme il sera en liaison directe avec le processeur de l'OC32, la puissance disponible est limitée.Je n'ai cependant trouvé aucune information quant à la valeur de cette limitation.
Il est à placer dans la partie jaune (à gauche).
Les 8 broches de commande du groupe alimenté par ce boîtier de résistances sont au potentiel négatif (-) .
L'accessoire sera connecté entre Vp (+) sous une tension de 5V ( tension interne de la carte) et une des 8 broches de commande du même groupe qui jouera le rôle du pôle négatif (-).
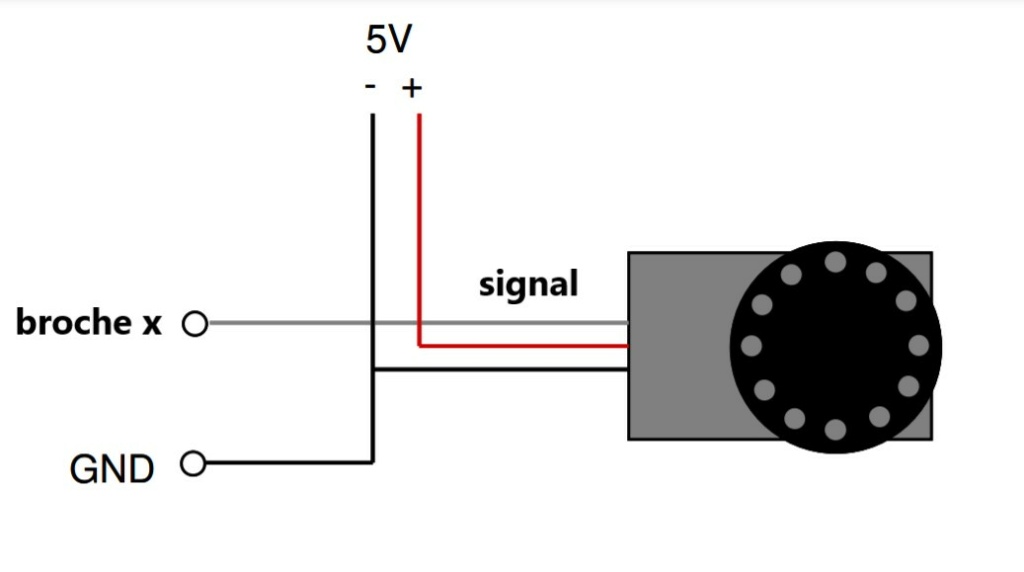
* Elle permet d'utiliser comme accessoire sur le réseau un interrupteur, un contact ou même un contact d'un relais pour envoyer une instruction ponctuelle dans l'OC32. L'accessoire via la broche de commande devient alors une broche d'entrée d'instruction qui sera utilisé par le processeur de l'OC32. Voir la section gestion des événements ci-dessous.
Il est conseillé, pour cet usage, d'utiliser des résistances de 1kOhms.
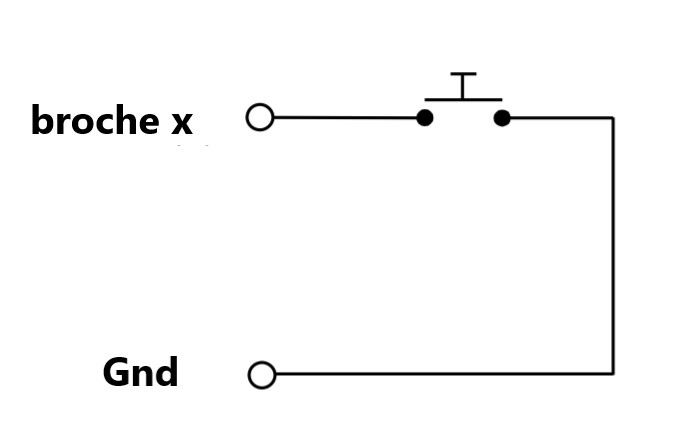
C'est effectivement un usage qui peut être intéressant. Reportez vous à la section « gestion des évènements » ci -après.
Les mode d'emplois signalent les possibilités supplémentaires suivantes :
* être utilisé pour la gestion d'un servo-moteur. Cet accessoire fera l'objet d'une discussion en 7-6-7.
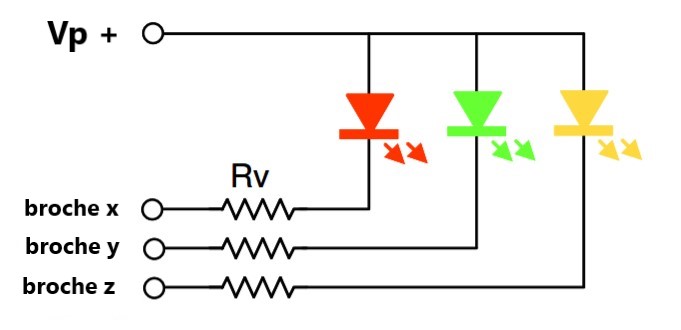
* gérer des leds, avec comme avantage de ne plus avoir à insérer des résistances dans le circuit. Ces leds seront connectées soit entre Vp(+) et une broche de commande , soit entre Gnd(-) et une broche de commande. Admettons, mais nous savons tous que selon la couleur, la luminosité est différente. Cette solution, techniquement possible, risque de ne pas donner un résultat optimal. Je préfère rester sur un Sink driver et ajouter les résistances adhoc à chaque led, surtout au prix où sont ces résistances.
7-7-6 les boitiers pilotes plus pointus.
OC32-ADM/MX (4,8A multiplexer) , OC32-ADM/FH (4,8A Full H-bridge), ... qui dépassent le cadre de ces explications.
7-8 Gestion d'un servo-moteur sans ou avec le SP04
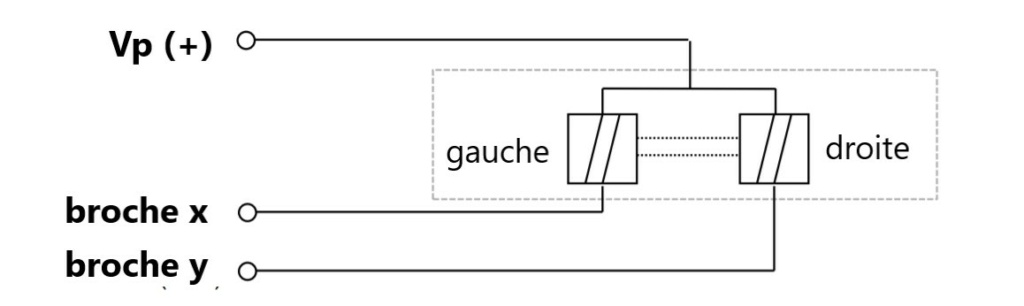
Un servomoteur doit être alimenté avec une tension d'alimentation comprise entre 4,5V et 6V dont les polarités doivent pouvoir s'inverser pour faire fonctionner le servo dans les deux sens. Un montage avec un boîtier Sink pilote conjoint avec un boîtier Source pilote ( voir 7-7-3) ne peut être utilisé car il interférerait avec le signal de pilotage du servo.
Nous utiliserons donc un boîtier de multiples résistances (cnf 7-7-5) de valeurs conseillées de 220 Ohms.
Un servo a une consommation de courant trop importante pour être supportée par la puissance interne 5V disponible sur l' OC32. N'oublions pas que nous n'utilisons pas içi un ADM (à polarités fixes) pouvant supporter 4,8A en pointe.
Attention aux confusions générées par les divers mode d'emploi qui vous disent à certains endroits : « à brancher sur la carte », tout en infirmant cette info à d'autres endroits, sous peine de griller la dite carte. Gardez à l'esprit qu'un servo doit être alimenté par une source extérieure à la carte.
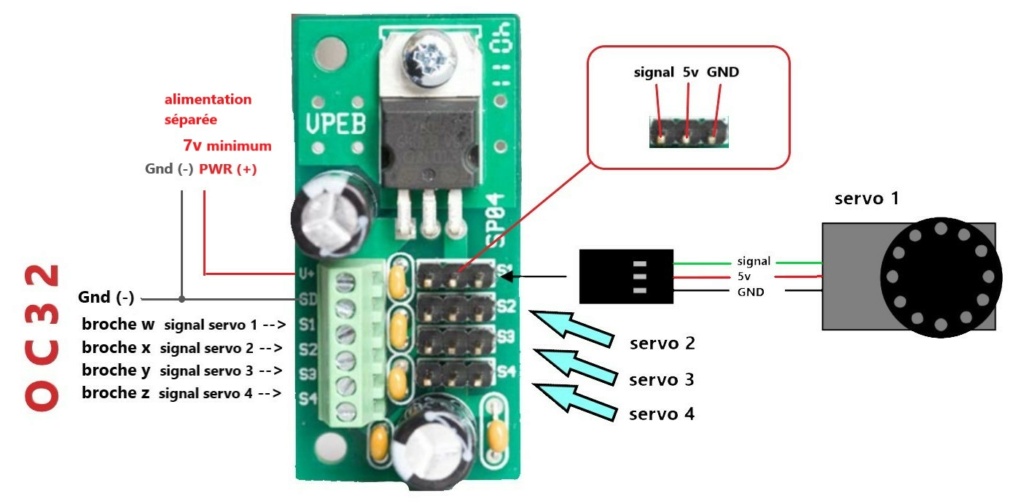
A/ sans SP04 :
Dans cette configuration simpliste (car les parasites générés par le servo ne sont pas filtrés), il est important d'alimenter le servo avec une alimentation stabilisée séparée.
n.b. : N'oubliez pas les cavaliers JP1 ou JP2 correspondant selon les explications reprises en 7-3-2 pour isoler ce groupe de broches de commande du reste de la carte.
b/ avec SP04 :
c'est un module spécialement conçu pour gérer 4 servo-moteurs.
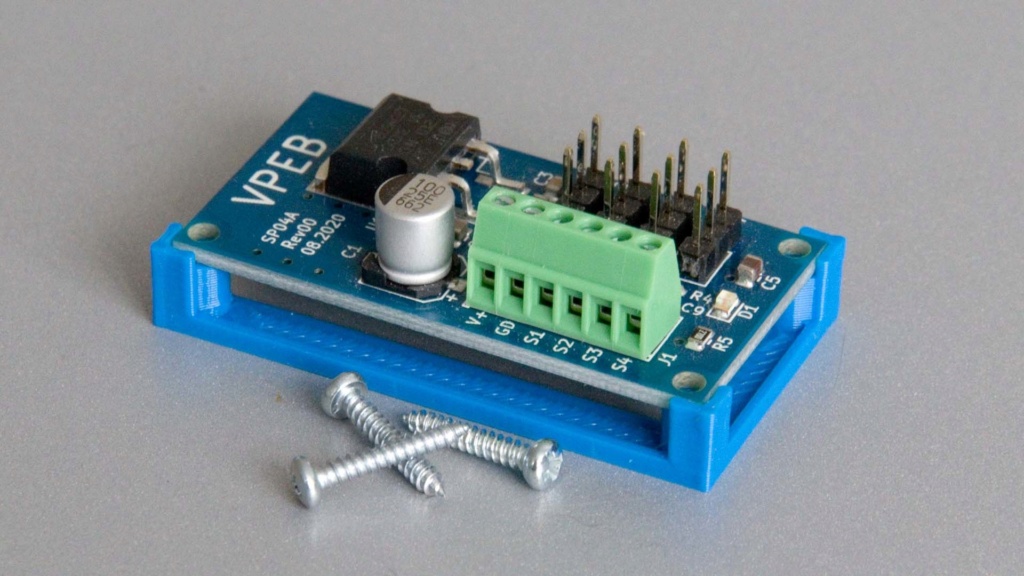
les trous de montage sont d'un diamètre de 3mm.
versions disponibles :
Le SP04 est une version améliorée de son prédécesseur, le SP4. La principale différence est que des condensateurs additionnels suppriment l'effet d'interférences du signal entre l'OC32 et le SP04. Le SP04 peut aussi être placé plus loin de l'OC32.
Le SP04 est disponible en 2 versions : SP04 et SP04R.
La version SP04R dispose de 4 résistances placées entre la ligne du signal d'asservissement et le +5V. Elles diminuent fortement les défauts des servos bon marché. Dès que vous mettez sous tension ce type de servo, il tourne spontanément légèrement. Cet effet indésirable est supprimé avec ces résistances.
La version SP04 n'a pas ces résistances.
Je n'ai aucune expérience permettant de juger de l'impact réel de ces résistances sur un servo. Je suppose que cela dépendra du type de servo utilisé. Désolé pour cette langue de bois. Je peux juste stipuler que le concepteur laisse clairement le choix entre « avec » ou « sans » résistances.
Utilisation :
Le SP04 doit être alimenté par une tension continue non nécessairement stabilisée d'au moins 7 Volts sans toutefois trop s'en éloigner.
En effet, le SP04 va transformer cette tension en sortie de 5v et dissiper le reste en chaleur. Une tension trop importante à ses bornes risque donc de le faire chauffer inutilement. Cette chaleur sera dissipée par la partie cuivrée au verso du SP04. Veillez à laisser l'air y circuler, par exemple en le fixant avec des espaceurs.
n.b. : N'oubliez pas les cavaliers JP1 ou JP2 correspondant selon les explications reprises en 7-3-2 pour isoler ce groupe de broches de commande du reste de la carte.
7-9 gestion des évènements
... à suivre ...
7-1 principe et descriptif
Cette carte – un micro ordinateur sans clavier ni écran- est un peu le couteau suisse du système tant ses possibilités sont étendues. Elle prend en charge la commande des moteurs d'aiguillages, la signalisation, l'illumination, les boutons poussoirs, les relais, peut simuler une soudure à l'arc, etc...bref, tout ce qui ne concerne pas la gestion des cantons (réalisée par le TM44).
Ses 32 broches de commande d'entrée/sortie peuvent être pilotées individuellement et indépendamment les unes des autres. Elles sont électriquement subdivisées en 4 groupes de 8 broches. Les propriétés électriques de chaque groupe peuvent être définies en choisissant le boîtier pilote (appelé « driver » chez Dinamo) adéquat en fonction des propriétés désirées. Un boîtier pilote est un module électronique (ADM) ou un circuit intégré (IC) qui sera enfiché sur l'OC32.
Couteau suisse, donc fatalement beaucoup de possibilités à expliciter et à maîtriser.
Quand vous achetez un OC32, vous le recevez avec 4 boîtiers pilotes standards pré-montés. Dans certains cas, il vous faudra des drivers plus spécifiques à acheter séparément, comme celui représenté à droite de la figure ci-dessus ( un ADM/SI). Ils sont facile à monter par emboîtement sur la carte. Ce sera développé en 7-7.
Comme d'hab, placez votre carte au plus près des accessoires à commander.
ATTENTION : une carte OC32 ne peut supporter en continu qu'un courant total de maximum 3A, à répartir entre ses 32 broches de commande.
7-2 le branchement sur les broches de commande.
Pour chaque groupe vous avez en réalité une première broche commune GND (-), suivie des 8 broches de commande, suivies d'une broche commune Vp (+).
L'accessoire (ex une led ou une bobine de solénoïde), se branchera soit entre Vp (+) et une broche de commande, soit entre GND (-) et une broche de commande. Cela dépendra du boîtier pilote que vous aurez installé.
Une contrainte à respecter : ne pas mélanger le connexions entre les quatre groupes. Exemple d’erreur à ne pas commettre : un accessoire branché sur le Vp (+) du groupe n°1 et sur une broche de commande du groupe n°2.
7-3 alimentation d'entrée de la carte et des broches de commande.
7-3-1 généralités
Tout ce qui a été expliqué pour le TM44 reste valable pour l'OC32, chaque carte recevant sa propre alimentation en courant continu. Le feeder refait içi son apparition ( cnf sixième avantage du chapitre 2).
Vous pouvez évidement utiliser plusieurs sources d'alimentation ou tout alimenter avec le même feeder.
On considère qu'une puissance de 2A est généralement suffisante pour débuter.
Petit rappel de branchement :
comment finaliser le feeder :
C'est une bonne idée d'avoir au moins un feeder Gnd (-) de manière relier toutes les bornes Gnd (-) de toutes les alimentations et de toutes les cartes.
Cette carte accepte une tension en courant continu comprise entre 7V et 20V, 15v étant conseillé par le constructeur.
Si vous avez des appareils qui ont absolument besoin d'un courant alternatif, utilisez un relais pour les piloter.
Selon les besoins de vos accessoires, la tension utilisée pour un ou des OC32 peut être différente de celle utilisée pour vos TM44 ou même des autres OC32. Vous pouvez aussi créer un feeder spécifique pour vos OC32, ou les brancher directement sur vos alimentations en courant continu.
7-3-2 deux tensions différentes sur les broches de commande
La tension de sortie appliquée sur les broches de commande est réglée en usine pour être la même que celle que vous appliquez à l'entrée de la carte OC32. Or c'est cette tension qui pilotera vos accessoires.
Il est possible de la moduler en séparant électriquement les broches de commande n° 0 à 15 des broches de commande n° 16 à 31 ou séparer le tout de la tension d'entrée.
La carte OC32 possède à cet effet 2 cavaliers (JP1 et JP2) permettant cette gestion des tensions :
Regardez maintenant ce schéma des liaisons électriques tel que reçu à l'achat :
on y voit que la tension d'entrée PWR (+) est communiquée aux bornes de commande Vp1 et Vp2 via les cavaliers JP1 et JP2. Si vous retirez un ou les deux cavaliers, vous isolez électriquement les bornes de commande correspondantes du reste de la carte.
Vous pouvez alors brancher une alimentation externe sur cette borne de commande Vp1 et/ou Vp2. Leurs deux tensions peuvent être différentes de celle d'entrée PWR.
Les différentes combinaisons possibles sont reprises ci-dessous :
cavalier JP1 retiré, cavalier JP2 connecté : Vp1 peut être alimenté séparément.
cavalier JP2 est retiré, cavalier JP1 est connecté : Vp2 (+) peut être alimenté séparément.
cavalier JP1 est connecté ET Vp1(+) est alimenté séparément, cavalier JP2 est retiré ET VP2 (+) est alimenté séparément : interdiction de brancher une alimentation en entrée sur PWR (+). La carte est alimentée en interne au départ de Vp1 (+)
cavalier JP2 est connecté ET Vp2 (+) est alimenté séparément, cavalier JP1 est retiré ET VP1 (+) est alimenté séparément : interdiction de brancher une alimentation en entrée sur PWR (+). La carte est alimentée en interne au départ de Vp2 (+)
n.b. : si vous retirez les deux cavaliers JP1 et JP2, la tension d'entrée PWR (+) ne servira que pour alimenter la carte OC32 en interne, cette tension d'entrée étant convertie en interne en 5v.
Rappel : la tension d'entrée à appliquer sur la carte est de minimum 7volts en courant continu (cc) stabilisé
Important : Assurez-vous que les pôles négatifs GND (-) de toutes les alimentations utilisées sont tous connectés les uns aux autres ET aux bornes GND (-) des cartes Dinamo.
C'est déjà le cas en interne pour chaque carte Dinamo.
Un feeder GND(-) serait dès lors une excellente solution.
7-3-3 un nombre infini de tensions sur les broches de commande
Le nombre de tensions d'alimentations différentes est pratiquement illimité avec l'utilisation des boîtiers pilotes SINK Driver que vous découvrirez ci-après.
Après avoir retiré le cavalier Jp1 et/ou Jp2 adhoc ( cnf 7-3-2), l'accessoire sera connecté d'une part à une broche de commande (-) de l'OC32 et d'autres part non plus sur la borne Vp (+) , mais directement au pôle positif de l'alimentation externe désirée.
Aussi longtemps que le pôle négatif GND (-) de toutes ces alimentations sont connectés les uns aux autres et au GND (-) de la OC32, le pôle positif de chacune de ces alimentations peut en effet être utilisé pour alimenter séparément un ou plusieurs accessoires.
n.b. : valable exclusivement avec les boîtiers pilotes SINK Driver à l'exclusion des autres.
Franchement, peut-on faire plus flexible ?
7-4 branchement au réseau RS485/RJ45 pour le pilotage des cartes.
Simplissime. Reportez-vous au chapitre 6. Tout y est expliqué.
Le mix entre TM44 et OC32 est laissé à votre libre choix. Il suffit de brancher les cartes les unes aux autres avec les câbles RJ45 adhoc pour obtenir une communication bi-directionnelle.
7-5 Terminateurs à activer ou à désactiver
La dernière carte est celle qui n'a qu'un seul connecteur RJ45 branché, l'autre restant vide.
Si tel est le cas pour votre OC32, vous devez activer ses « terminateurs ». Sinon, vous devez désactiver ses « terminateurs »
Pour activer le terminateur (ON), placez les deux cavaliers comme indiqué dans la figure ci-dessus. Faites attention à ne pas les insérer en les décalant de 90 degrés, car votre réseau ne fonctionnera plus.
Pour désactiver le terminateur (OFF), retirez les deux cavaliers. Si vous ne voulez pas perdre les cavaliers lorsque les terminateurs sont désactivés, vous pouvez placer chaque cavalier sur une seule broche en laissant l'autre partie du cavalier « dans le vide ».
7-6 définir l'adresse de votre OC32
Vous pouvez connecter un maximum de 16 modules OC32 par système Dinamo P & P.
Chaque carte OC32 doit avoir une adresse exclusive, sans doublon.
Notez que une carte TM44 et une carte OC32 peuvent avoir la même adresse car elles sont de deux familles totalement différentes.
L'adresse est sélectionnée avec des 6 commutateurs DIP. ( voir 7-1) dont seuls les quatre premiers sont utilisés.
Comme c'est le cas avec le TM44, gardez en mémoire que certain logiciel de gestion sur le PC ajuste toutes les adresses avec +1. Vérifiez sur le logiciel.
n.b. : les adresses des cartes sont chargées une fois par cession lors de la mise sous tension de la centrale RM-C/1+. Si vous modifiez l'adresse d'une carte, il vous faudra ensuite éteindre et relancer la centrale pour que votre modification devienne active.
Remarque finale : il est possible d'utiliser jusqu'à 96 OC32 avec des adresses étendues. Dans ce cas, les 6 dipswitchs ne sont plus utilisés, mais tout est géré par une configuration spéciale injectée dans la mémoire flash de l'OC32. Il faut aussi que votre logiciel sur le PC puisse gérer cette possibilité. C'est pointu et réservé aux pros que je renvoie à la doc en anglais/néerlandais du site du constructeur.
7-7 les boîtiers pilotes ( Drivers).
On arrive au poumons de l'OC32, son cœur étant le processeur que nous analyserons par après.
Nous avons vu en 7-1 que la carte possède 4 zones de triples emplacements pour y insérer soit des modules électroniques (ADM) ou des circuits intégrés (IC) .
une zone est cerclé de rouge, avec l'emplacement de gauche en jaune ( appelé « sink » par Dinamo) , de droite en vert ( appelé « source » par Dinamo) et le troisième en bleu ( appelé « AMD » par Dinamo).
Vous ne pouvez utiliser qu'un seul emplacement par zone, sauf exception expliquée plus tard. Le fait de laisser les autres vides dans une même zone ne pose évidement aucun soucis.
Pour installer un nouveau boîtier pilote, le maître mot est « délicatesse ». : a / couper le courant b/ vérifier le sens dans lequel vous enchâssez le boîtier pilote c/ vérifier que toutes ses pattes sont parfaitement emboîtées d/ vous pouvez rebrancher.
Les pilotes disponibles sont :
d'abord les deux plus importants :
7-7-1 Sink Drivers 500mA (TBD62083).
Ce sont les trois de gauche au point 7-1.
C'est le pilote standard livré d'usine avec la carte car son usage est universel.
Son emplacement est dans la partie jaune (à gauche) de la zone.
Les 8 broches de commande du groupe alimenté par ce boîtier pilote sont au potentiel négatif (-).
Chaque broche de commande peut délivrer 500mA, MAIS le total des 8 broches concernées ne peut dépasser 1A en même temps.
L'accessoire sera connecté entre Vp (+) et une des 8 broches de commande (sortie 500mA) du même groupe qui jouera le rôle du pôle négatif (-).
Ex :
7-7-2 OC32-ADM/SI (4,8A power sink-driver)
C'est celui présenté à droite au point 7-1.
Son emplacement est dans la partie bleue de la zone.
Les 8 broches de commande du groupe alimenté par ce boîtier pilote sont au potentiel négatif (-).
Il est à utiliser lorsque le courant nécessaire est supérieur à 500mA, par exemple pour le solénoïde d'un moteur d’aiguillage.
Chaque sortie peut fournir 4,8A comme maximum absolu
Attention : il s'agit d'un courant de pointe. La charge continue doit être maintenue en dessous de 2A par broche et moins de 3A de courant total pour un OC32.
L'accessoire sera connecté entre Vp (+) et une des 8 broches de commande du même groupe qui jouera le rôle du pôle négatif (-).
Ex :
si vous avez des contacts de fin de course, prévoyez des condensateurs comme représentés ci-dessous
ensuite les autres :
7-7-3 Source Drivers 500mA (TBD62783)
Son emplacement est dans la partie verte (à droite) de la zone.
Les 8 broches de commande du groupe alimenté par ce boîtier pilote sont au potentiel positf (+).
Chaque broche peut délivrer 500mA, MAIS le total des 8 broches concernées ne peut dépasser 1A en même temps.
L'accessoire sera connecté entre GND (-) et une des 8 broches de commande (sortie 500mA) du même groupe qui jouera le rôle du pôle positif (+).
Peu utilisé, sauf dans des cas particuliers tel qu'un moteur demandant une inversion de polarité à ses bornes pour inverser son sens de rotation.
Dans ce cas, il faut monter en même temps un Sink driver et un Source driver dans le même groupe. Attention que les deux drivers ne pourront jamais être activés en même temps, sous peine de destruction immédiate. La gestion des drivers est expliqué dans le chapitre sur la programmation du processeur de l'OC32.
Le moteur sera branché sur deux broches de commande dont les polarités seront inversées par le processeur pour inverser son sens de rotation.
Il faudra être parfaitement sûr de sa programmation pour éviter tout clatch !
7-7-4 OC32-ADM/SO (4,8A power source-driver)
Son emplacement est dans la partie bleue de la zone.
Les 8 broches de commande du groupe alimenté par ce boîtier pilote sont au potentiel positif (+).
Il est à utiliser lorsque le courant nécessaire est supérieur à 500mA.
Chaque sortie peut fournir 4,8A comme maximum absolu
Attention : il s'agit d'un courant de pointe. La charge continue doit être maintenue en dessous de 2A par broche et moins de 3A de courant total pour un OC32.
L'accessoire sera connecté entre GND (-) et une des 8 broches de commande du même groupe qui jouera le rôle du pôle positif (+).
7-7-5 Resistor Array (5V outputs)
Ce n'est pas un véritable boitier pilote mais simplement un groupe de résistances mises dans un boitier de CI ( DIL16 version avec résistances individuelles de valeur minimale supérieure à 100 ohms). La valeur des résistances est à votre libre choix selon vos besoins.
Comme il sera en liaison directe avec le processeur de l'OC32, la puissance disponible est limitée.Je n'ai cependant trouvé aucune information quant à la valeur de cette limitation.
Il est à placer dans la partie jaune (à gauche).
Les 8 broches de commande du groupe alimenté par ce boîtier de résistances sont au potentiel négatif (-) .
L'accessoire sera connecté entre Vp (+) sous une tension de 5V ( tension interne de la carte) et une des 8 broches de commande du même groupe qui jouera le rôle du pôle négatif (-).
* Elle permet d'utiliser comme accessoire sur le réseau un interrupteur, un contact ou même un contact d'un relais pour envoyer une instruction ponctuelle dans l'OC32. L'accessoire via la broche de commande devient alors une broche d'entrée d'instruction qui sera utilisé par le processeur de l'OC32. Voir la section gestion des événements ci-dessous.
Il est conseillé, pour cet usage, d'utiliser des résistances de 1kOhms.
C'est effectivement un usage qui peut être intéressant. Reportez vous à la section « gestion des évènements » ci -après.
Les mode d'emplois signalent les possibilités supplémentaires suivantes :
* être utilisé pour la gestion d'un servo-moteur. Cet accessoire fera l'objet d'une discussion en 7-6-7.
* gérer des leds, avec comme avantage de ne plus avoir à insérer des résistances dans le circuit. Ces leds seront connectées soit entre Vp(+) et une broche de commande , soit entre Gnd(-) et une broche de commande. Admettons, mais nous savons tous que selon la couleur, la luminosité est différente. Cette solution, techniquement possible, risque de ne pas donner un résultat optimal. Je préfère rester sur un Sink driver et ajouter les résistances adhoc à chaque led, surtout au prix où sont ces résistances.
7-7-6 les boitiers pilotes plus pointus.
OC32-ADM/MX (4,8A multiplexer) , OC32-ADM/FH (4,8A Full H-bridge), ... qui dépassent le cadre de ces explications.
7-8 Gestion d'un servo-moteur sans ou avec le SP04
Un servomoteur doit être alimenté avec une tension d'alimentation comprise entre 4,5V et 6V dont les polarités doivent pouvoir s'inverser pour faire fonctionner le servo dans les deux sens. Un montage avec un boîtier Sink pilote conjoint avec un boîtier Source pilote ( voir 7-7-3) ne peut être utilisé car il interférerait avec le signal de pilotage du servo.
Nous utiliserons donc un boîtier de multiples résistances (cnf 7-7-5) de valeurs conseillées de 220 Ohms.
Un servo a une consommation de courant trop importante pour être supportée par la puissance interne 5V disponible sur l' OC32. N'oublions pas que nous n'utilisons pas içi un ADM (à polarités fixes) pouvant supporter 4,8A en pointe.
Attention aux confusions générées par les divers mode d'emploi qui vous disent à certains endroits : « à brancher sur la carte », tout en infirmant cette info à d'autres endroits, sous peine de griller la dite carte. Gardez à l'esprit qu'un servo doit être alimenté par une source extérieure à la carte.
A/ sans SP04 :
Dans cette configuration simpliste (car les parasites générés par le servo ne sont pas filtrés), il est important d'alimenter le servo avec une alimentation stabilisée séparée.
n.b. : N'oubliez pas les cavaliers JP1 ou JP2 correspondant selon les explications reprises en 7-3-2 pour isoler ce groupe de broches de commande du reste de la carte.
b/ avec SP04 :
c'est un module spécialement conçu pour gérer 4 servo-moteurs.
les trous de montage sont d'un diamètre de 3mm.
versions disponibles :
Le SP04 est une version améliorée de son prédécesseur, le SP4. La principale différence est que des condensateurs additionnels suppriment l'effet d'interférences du signal entre l'OC32 et le SP04. Le SP04 peut aussi être placé plus loin de l'OC32.
Le SP04 est disponible en 2 versions : SP04 et SP04R.
La version SP04R dispose de 4 résistances placées entre la ligne du signal d'asservissement et le +5V. Elles diminuent fortement les défauts des servos bon marché. Dès que vous mettez sous tension ce type de servo, il tourne spontanément légèrement. Cet effet indésirable est supprimé avec ces résistances.
La version SP04 n'a pas ces résistances.
Je n'ai aucune expérience permettant de juger de l'impact réel de ces résistances sur un servo. Je suppose que cela dépendra du type de servo utilisé. Désolé pour cette langue de bois. Je peux juste stipuler que le concepteur laisse clairement le choix entre « avec » ou « sans » résistances.
Utilisation :
Le SP04 doit être alimenté par une tension continue non nécessairement stabilisée d'au moins 7 Volts sans toutefois trop s'en éloigner.
En effet, le SP04 va transformer cette tension en sortie de 5v et dissiper le reste en chaleur. Une tension trop importante à ses bornes risque donc de le faire chauffer inutilement. Cette chaleur sera dissipée par la partie cuivrée au verso du SP04. Veillez à laisser l'air y circuler, par exemple en le fixant avec des espaceurs.
n.b. : N'oubliez pas les cavaliers JP1 ou JP2 correspondant selon les explications reprises en 7-3-2 pour isoler ce groupe de broches de commande du reste de la carte.
7-9 gestion des évènements
... à suivre ...
OUPS65
membre AFAN et AGP3D, I-TRAIN - centrale DINAMO RM-C + TM44 et OC32/GN - imprimantes 3D ELEGOO Saturn et MK3S
membre AFAN et AGP3D, I-TRAIN - centrale DINAMO RM-C + TM44 et OC32/GN - imprimantes 3D ELEGOO Saturn et MK3S
-
Stef84
- Messages : 1
- Inscription : 24 déc. 2023, 12:15
- Type de centrale : Ne sait pas encore
- Localisation : Vaucluse (France)
Re: Dinamo = analogique + digital
Bonjour,
Bon Noël 2023
Bravo et merci pour cette traduction.
Cela m'a mis l'eau à la bouche
Où peut on trouver les éléments de Dinamo, pour éventuellement acheter ?
Merci
Bon Noël 2023

Bravo et merci pour cette traduction.
Cela m'a mis l'eau à la bouche

Où peut on trouver les éléments de Dinamo, pour éventuellement acheter ?
Merci
-
oups65
- Messages : 322
- Inscription : 01 oct. 2013, 17:45
- Type de centrale : Analogique et numérique
- Localisation : TOURNAI
Re: Dinamo = analogique + digital
Bonjour,
le lien devrait être : https://www.vpeb.nl/index.php/aandeslag/index.html
le lien devrait être : https://www.vpeb.nl/index.php/aandeslag/index.html
- vpeb.jpg (140.39 Kio) Consulté 738 fois
OUPS65
membre AFAN et AGP3D, I-TRAIN - centrale DINAMO RM-C + TM44 et OC32/GN - imprimantes 3D ELEGOO Saturn et MK3S
membre AFAN et AGP3D, I-TRAIN - centrale DINAMO RM-C + TM44 et OC32/GN - imprimantes 3D ELEGOO Saturn et MK3S