Dinamo = analogique + digital
Publié : 12 mai 2021, 20:18
le système DINAMO souffre d'un manque de renseignements en français, ce qui le pénalise bien évidement. Ayant dû, pour mes besoins personnels, traduire divers éléments d'informations, je me dis que ce travail pourrait servir à d'autre.
Il me faudra juste trouver du temps pour structurer le tout et construire une mise en page publiable. Donc, un peu de patience. Merci
chapitre 1 - généralités
chapitre 2 - les avantages de DINAMO
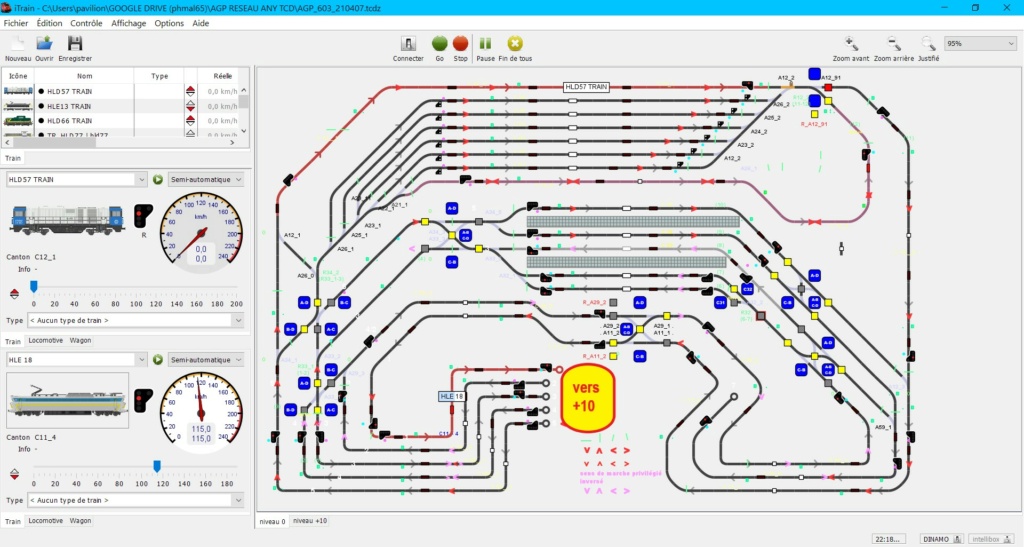
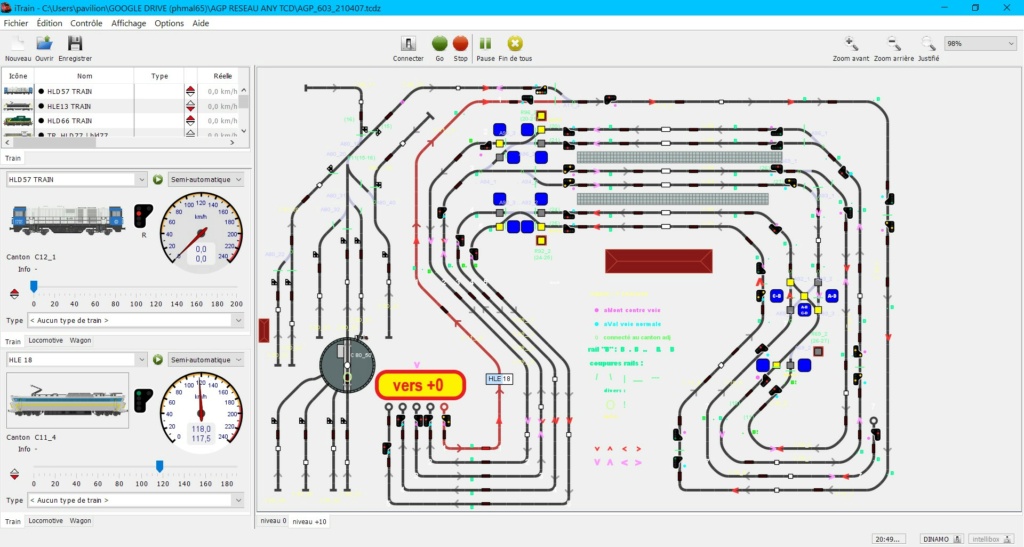
chapitre 3- le pilotage informatique du réseau
chapitre 4 : après les fleurs, quelques (petites) épines :
4-1 Préalable : Dinamo est génial.
4-2 le site Dinamousers et le forum
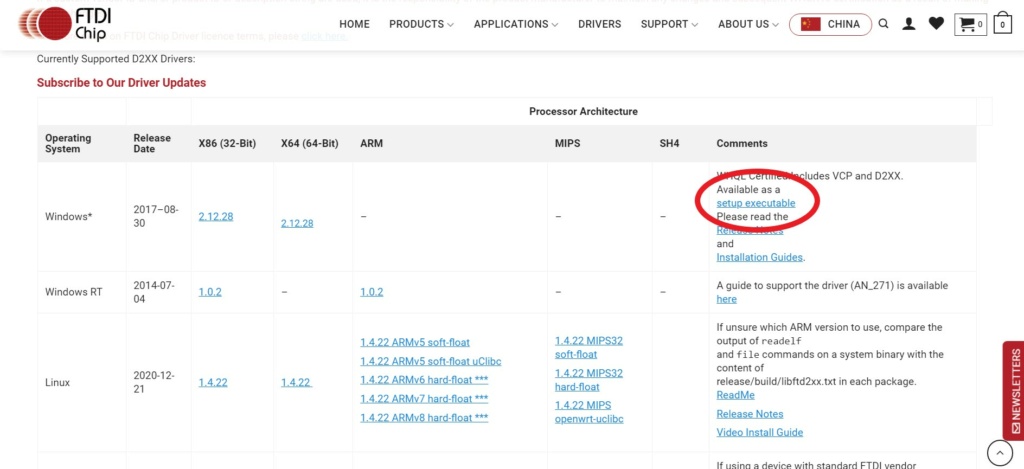
4-3 le pilote USB à télécharger
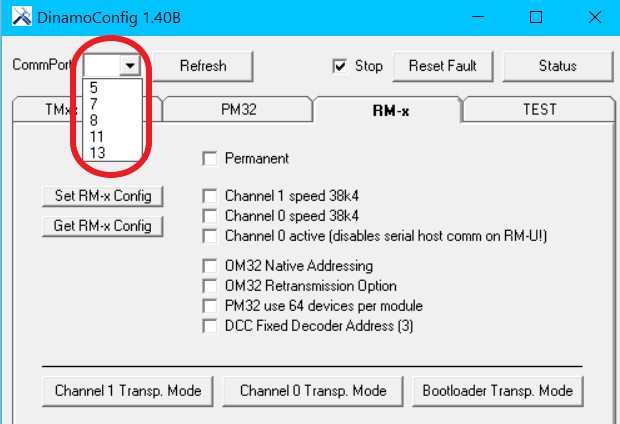
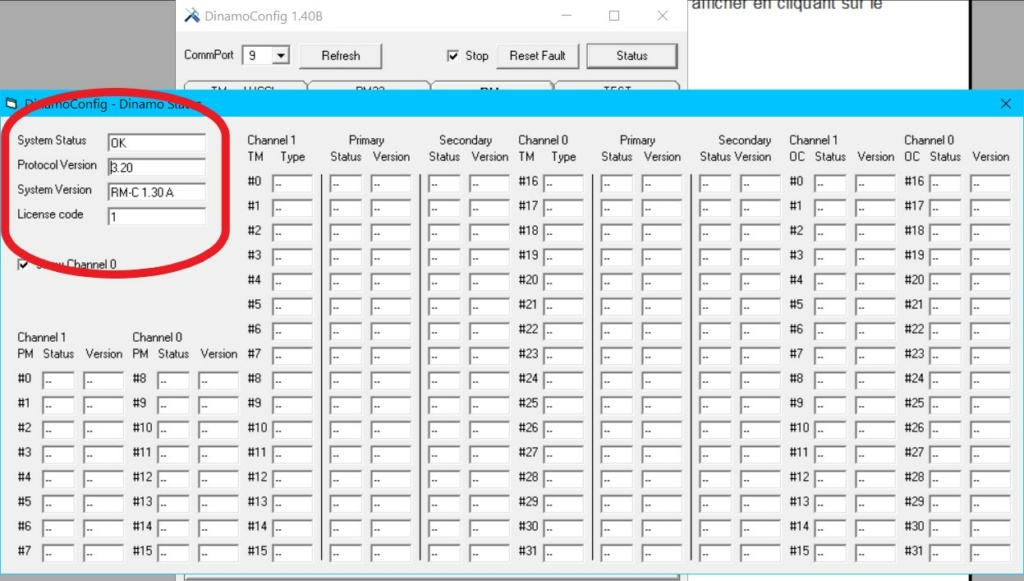
4-4 le programme « DinamoConfig »
4-5 le programme «AVRootloader.» (= VPEB Bootloader sur le site)
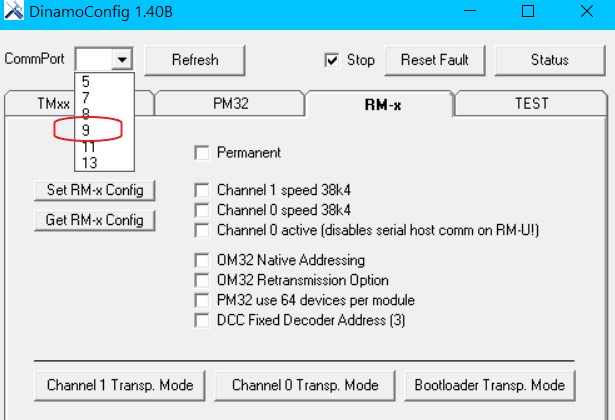
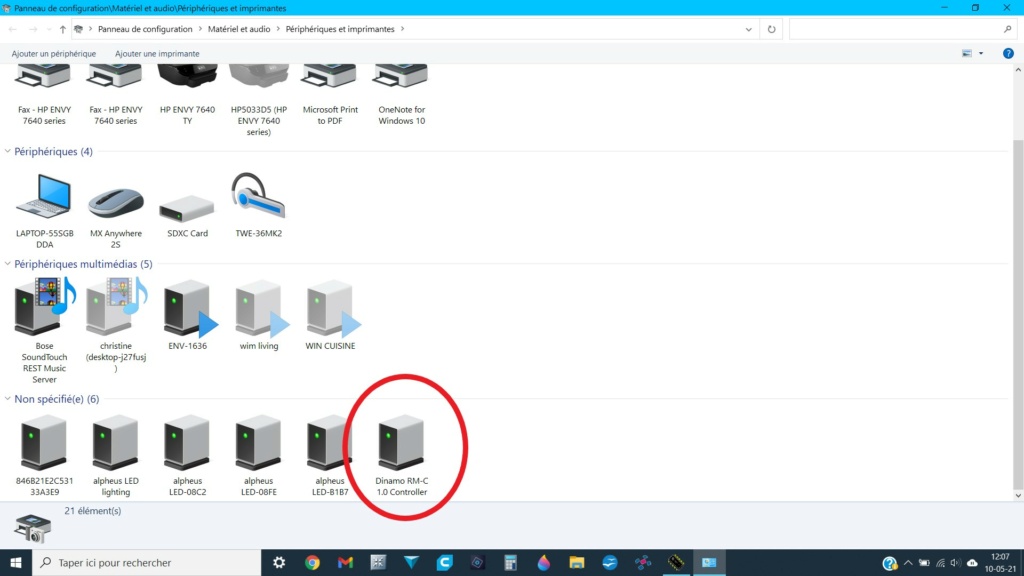
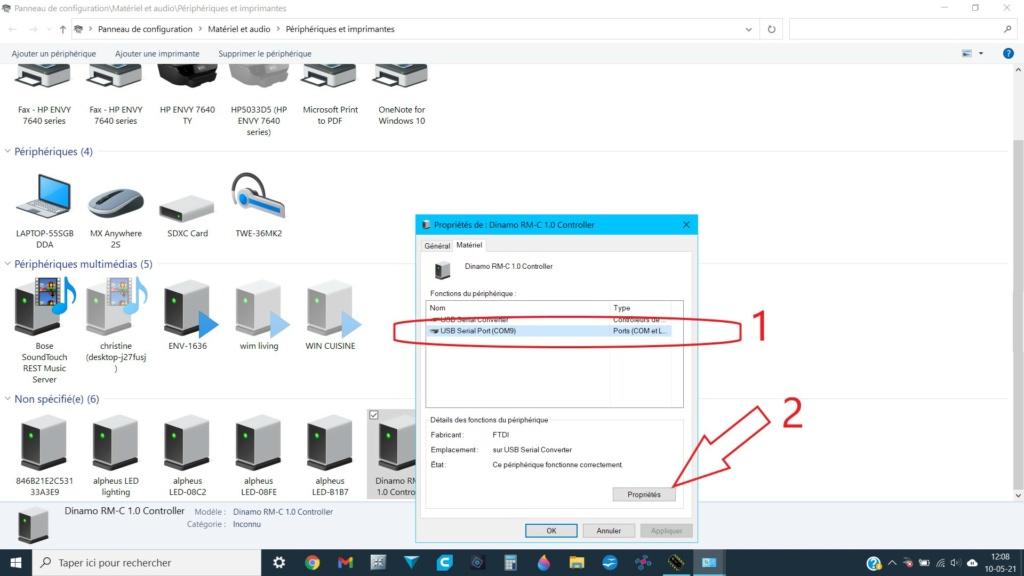
4-6 trouver le n° com du port de communication Windows
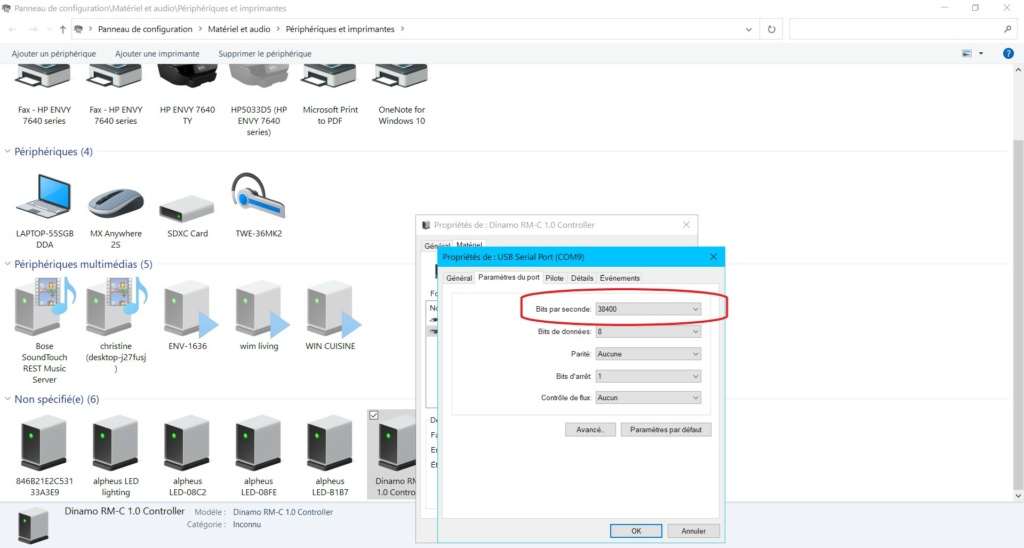
4-7 paramétrer correctement ce n° com.
chapitre 5 : la centrale (RM-C) .
5-1 descriptif et détails
5-2 mise à niveau éventuelle de son micrologiciel
chapitre 6 : la gestion des cantons avec le TM44
6-1 : préalable : le canton et ses sections
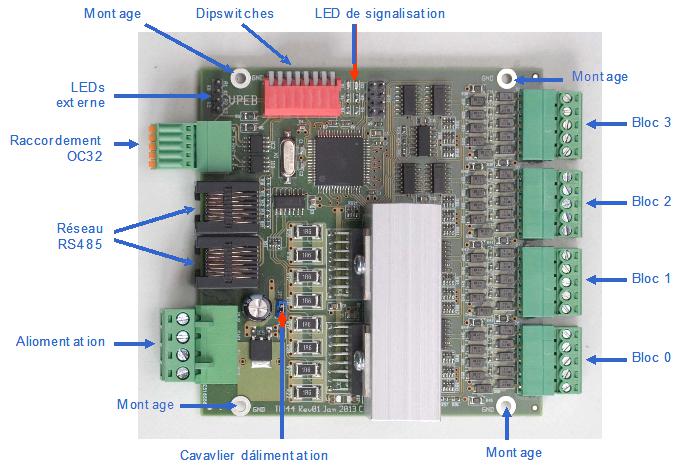
6-2 : descriptif
6-3 : le câblage entre le TM44 et les cantons.
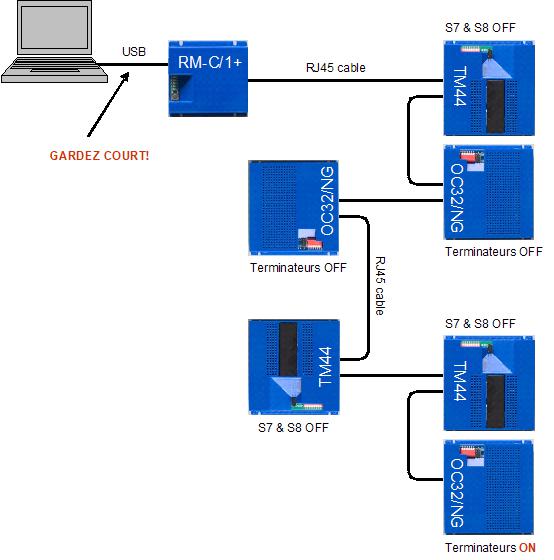
6-4 : câblage du réseau RJ45 – RS485
6-5 Quelle est la dernière carte TM44 ou OC32 du réseau ?
6-6 : adresses des cartes TM44
6-7 TM44 Maître / Esclaves
6-8 résumé pour les 8 sélecteurs du bloc rouge d'une carte TM44
6-9 : adresses des cantons dans une carte TM44
6-10 : adresses des 4 sections d'un canton dans une carte TM44 6-11 : l'alimentation électrique des cartes et du réseau
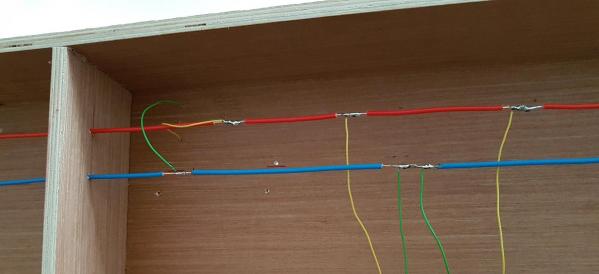
6-11- 1 la source en courant continu
6-11- 2 le câblage entre la source de courant et les cartes = le feeder
6-11- 3 PWM ou "modulation de largeur d'impulsion", quésako ?
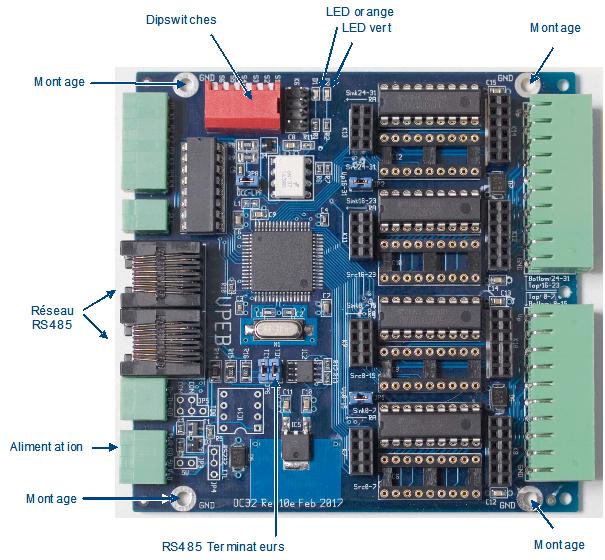
chapitre 7 : OC32/NG et la gestion des accessoires
7-1 : principe et descriptif
7-2 : le branchement sur les broches de commande des accessoires.
7-3 : alimentation d'entrée de la carte et des broches de commande.
7-3-1 : généralités
7-3-2 : deux tensions différentes sur les broches de commande
7-3-3 : un nombre infini de tensions sur les broches de commande
7-4 : branchement au réseau RS485/RJ45 pour le pilotage des cartes.
7-5 : Terminateurs à activer ou à désactiver
7-6 : définir l'adresse de votre OC32
7-7 : les boîtiers pilotes ( Drivers).
7-7-1 : Sink Drivers 500mA (TBD62083)
7-7-2 : OC32-ADM/SI (4,8A power sink-driver)
7-7-3 : Source Drivers 500mA (TBD62783)
7-7-4 : OC32-ADM/SO (4,8A power source-driver)
7-7-5 : Resistor Array (5V outputs)
7-7-6 : les boîtiers pilotes plus pointus.
7-8 : Gestion d'un servo-moteur sans ou avec un SP04
7-9 : gestion des événements
chapitre 8 : le programmation de l'OC32
.... à suivre
Il me faudra juste trouver du temps pour structurer le tout et construire une mise en page publiable. Donc, un peu de patience. Merci
chapitre 1 - généralités
chapitre 2 - les avantages de DINAMO
chapitre 3- le pilotage informatique du réseau
chapitre 4 : après les fleurs, quelques (petites) épines :
4-1 Préalable : Dinamo est génial.
4-2 le site Dinamousers et le forum
4-3 le pilote USB à télécharger
4-4 le programme « DinamoConfig »
4-5 le programme «AVRootloader.» (= VPEB Bootloader sur le site)
4-6 trouver le n° com du port de communication Windows
4-7 paramétrer correctement ce n° com.
chapitre 5 : la centrale (RM-C) .
5-1 descriptif et détails
5-2 mise à niveau éventuelle de son micrologiciel
chapitre 6 : la gestion des cantons avec le TM44
6-1 : préalable : le canton et ses sections
6-2 : descriptif
6-3 : le câblage entre le TM44 et les cantons.
6-4 : câblage du réseau RJ45 – RS485
6-5 Quelle est la dernière carte TM44 ou OC32 du réseau ?
6-6 : adresses des cartes TM44
6-7 TM44 Maître / Esclaves
6-8 résumé pour les 8 sélecteurs du bloc rouge d'une carte TM44
6-9 : adresses des cantons dans une carte TM44
6-10 : adresses des 4 sections d'un canton dans une carte TM44 6-11 : l'alimentation électrique des cartes et du réseau
6-11- 1 la source en courant continu
6-11- 2 le câblage entre la source de courant et les cartes = le feeder
6-11- 3 PWM ou "modulation de largeur d'impulsion", quésako ?
chapitre 7 : OC32/NG et la gestion des accessoires
7-1 : principe et descriptif
7-2 : le branchement sur les broches de commande des accessoires.
7-3 : alimentation d'entrée de la carte et des broches de commande.
7-3-1 : généralités
7-3-2 : deux tensions différentes sur les broches de commande
7-3-3 : un nombre infini de tensions sur les broches de commande
7-4 : branchement au réseau RS485/RJ45 pour le pilotage des cartes.
7-5 : Terminateurs à activer ou à désactiver
7-6 : définir l'adresse de votre OC32
7-7 : les boîtiers pilotes ( Drivers).
7-7-1 : Sink Drivers 500mA (TBD62083)
7-7-2 : OC32-ADM/SI (4,8A power sink-driver)
7-7-3 : Source Drivers 500mA (TBD62783)
7-7-4 : OC32-ADM/SO (4,8A power source-driver)
7-7-5 : Resistor Array (5V outputs)
7-7-6 : les boîtiers pilotes plus pointus.
7-8 : Gestion d'un servo-moteur sans ou avec un SP04
7-9 : gestion des événements
chapitre 8 : le programmation de l'OC32
.... à suivre